Изменение частоты вращения ротора приводит к соответствующим изменениям частоты переключения транзисторов коммутатора и, следовательно, к таким изменениям частоты вращения поля статора, при которых ротор и поле статора имеют одинаковую, синхронную, частоту вращения. Эта частота вращения зависит также от напряжения сети: с увеличением Uона растет, наводя в обмотках большую ЭДС. Таким образом, частота вращения ротора п и частота тока f в рассматриваемом двигателе являются функциями напряжения сети и нагрузки на валу, оставаясь связанными между собой соотношением, типичным для синхронной машины:
![]() (13.6)
(13.6)
Зависимость (13.6) является второй особенностью вентильных двигателей.
Третьей особенностью такого двигателя является постоянство
сдвига фаз θ (см. § 12.4). В самом деле, из рассмотренного принципа действия
видно, что фаза вектора ![]() определяется положением
оси ротора, а фа за вектора основной гармоники напряжения каждой обмотки
статора U1 - положением оси сектора ДПР (см. рис. 13.22). Так как ротор и
сектор ДПР жестко связаны между собой, сдвиг фаз между векторами
определяется положением
оси ротора, а фа за вектора основной гармоники напряжения каждой обмотки
статора U1 - положением оси сектора ДПР (см. рис. 13.22). Так как ротор и
сектор ДПР жестко связаны между собой, сдвиг фаз между векторами![]() и
и ![]() неизменен.
Поскольку вектор
неизменен.
Поскольку вектор ![]() отстает от вектора
отстает от вектора ![]() на 90°, то сдвиг указанных осей определяет
и неизменность θ.
на 90°, то сдвиг указанных осей определяет
и неизменность θ.
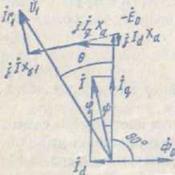
§ 13.10. Векторная диаграмма и характеристики вентильных двигателей
|
|
|
Рис.13.25. Векторная диаграмма вентильного двигателя |
Приложенное к каждой из обмоток статора напряжение имеет сложную ступенчатую форму (см. рис. 13.23). Однако, как показывает анализ, определяющую роль при такой форме играет первая гармоника напряжения, действующее значение которой составляет 0,955 от действующего значения ступенчатого напряжения. Проведем анализ для первой, основной гармоники напряжения U1при следующих допущениях: ЭДС обмотки - синусоидальна, магнитный поток ротора Фо = const, магнитная цепь двигателя не насыщена и транзисторные ключи идеальны. Напряжение U1уравновешивается суммой противо-ЭДС и падением напряжения Ir1на активном сопротивлении обмотки
![]() (13.7)
(13.7)
где![]() - ЭДС
вращения;
- ЭДС
вращения;![]() ,
, ![]() - поперечная
и продольная ЭДС реакции якоря;
- поперечная
и продольная ЭДС реакции якоря; ![]() -ЭДС рассеяния.
-ЭДС рассеяния.
Ток
обмотки статора также можно разложить на продольную (![]() =
=![]() sinψ) и
поперечную (
sinψ) и
поперечную (![]() =
= ![]() соsφ) составляющие (рис. 13.25). Тогда (как н
в обычной синхронной машине)
соsφ) составляющие (рис. 13.25). Тогда (как н
в обычной синхронной машине)
![]() (13.8)
(13.8)
где xad - индуктивное сопротивление фазы, обусловленное продольным потоком ![]() ; xaq-индуктивное сопротивление фазы, соответствующее поперечному потоку
; xaq-индуктивное сопротивление фазы, соответствующее поперечному потоку
![]() якоря; xs1 - индуктивное сопротивление фазы, определяемое потоком рассеяния
якоря; xs1 - индуктивное сопротивление фазы, определяемое потоком рассеяния ![]() .
.
С учетом (13.8) уравнение (13.7) принимает вид
![]() (13.9)
(13.9)
В синхронных магнитоэлектрических машинах, особенно с четырьмя или шестью полю сами, можно с достаточной для анализа точностью пренебречь различием магнитной проводимости по продольной и поперечной осям, т. е. принять
![]() (13.10)
(13.10)
Уравнение (13.9) запишем в виде
![]() (13.11)
(13.11)
Уравнению (13.11) соответствует векторная диаграмма рис. 13.25, из которой можно получить
![]()
где x1 = ха + xsl-синхронное индуктивное сопротивление фазы обмотки статора двигателя.
Электромагнитная мощность каждой фазы двигателя
![]() (13.12)
(13.12)
Вращающий момент двигателя
![]() (13.13) где mt-число фаз статора;
(13.13) где mt-число фаз статора;
![]() (13.14)
(13.14)
Представим ЭДС E0 согласно (7.7) с учетом (13.14) в виде
![]() (13.15)
(13.15)
где![]()
Подставив в (13.13) выражения (13.12) и (13.15), получим
![]() (13.16)
(13.16)
Положив в (13.16) ω= 0 и учтя, что при неподвижном роторе f = 0, В следовательно, и х1 = 0, найдем выражение для пускового момента:
![]()
Таким образом, при прочих равных условиях для создания наибольшего пускового момента следует установить θ = 0.
При ω ≠ 0
наибольшее значение электромагнитной мощности, а следовательно, вращающего
момента, как это видно из векторной диаграммы рис. 13.25, имеет место при θ =φ,
т. е. ток ![]() находится в фазе с ЭДС
находится в фазе с ЭДС![]() . Так как
. Так как ![]() зависит
от частоты
зависит
от частоты
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.