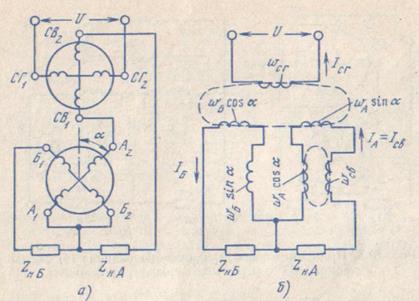
Для получения такой зависимости используют схемы линейных ВТ с первичным и вторичным симметрированием. Схема линейного ВТ с первичным симметрированием приведена на рис. 10.5, где показаны составляющие потоков ФАБd и ФАБq создаваемые обмотками А1 — А2, Б1 — Б2 по продольной и поперечной осям.
Главная статорная (СГ1 - СГ2) и
косинусная роторная (Б1 — Б2) обмотки соединены
последовательно и включены в сеть. Сопротивление нагрузки![]() что необходимо для компенсации поперечного
потока. Если пренебречь
потоками рассеяния, то ЭДС, наводимые во всех «поперечных»
обмотках, равны нулю. В этом случае ЭДС
что необходимо для компенсации поперечного
потока. Если пренебречь
потоками рассеяния, то ЭДС, наводимые во всех «поперечных»
обмотках, равны нулю. В этом случае ЭДС![]() наводимая
в синусной обмотке, нагруженной на ZнА, линейно зависит от
угла поворота
ротора. Пренебрегая активным сопротивлением обмоток и потоками рассеяния,
можно записать
наводимая
в синусной обмотке, нагруженной на ZнА, линейно зависит от
угла поворота
ротора. Пренебрегая активным сопротивлением обмоток и потоками рассеяния,
можно записать
![]() (10.8)
(10.8)
![]() (10.9)
(10.9)
Из уравнения (10.8) определим
![]() (10.10)
(10.10)
Подставив выражение (10.10) в (10.9), найдем
![]() (10.11)
(10.11)
аналогичное выражению (10.7).
Следует учесть, что коэффициент трансформации К должен несколько отличаться от значения С в выражении (10.7), так как при выводе равенства (10.11) не учитывалось влияние сопротивления обмоток. Практически К = 0,565. Тогда зависимость выходного напряжения UpA or угла поворота ротора α ВТ, включенного по схеме рис. 10.5,а, линейна в указанных ранее пределах. На рис. 10.5,б дана преобразованная схема линейного ВТ с первичным симметрированием..
|
|
|
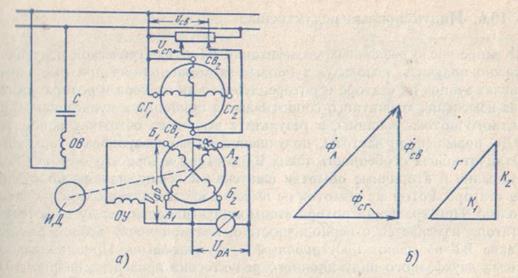
Рис. 10.6. Принципиальная {а) и преобразованная (б) схемы линейного ВТ со вторичным симметрированием |
В тех случаях, когда требуется постоянство входного сопротивления, применяют линейный ВТ с вторичным симметрированием (рис. 10.6,а).
В этой схеме главную статорную обмотку (СГ1 - СГ2) включают и сеть, а вспомогательную статорную (СВ1 - СВ2) и синусную роторную (А1 — А2) обмотки соединяют последовательно. В цепь этих обмоток включена нагрузка ZнА, с которой снимается выходное напряжение. Сопротивление Zнbкосинусной обмотки ротора Б1 — Б2 подбирают так, чтобы ВТ был полностью симметрирован, т. е. чтобы его выходное сопротивление было постоянным
Так как схема линейного ВТ с вторичным симметрированием по существу идентична схеме линейного ВТ с первичным симметрированием, то согласно теореме взаимности, сформулированной применительно к четырехполюсникам, для нее имеют место аналогичные соотношения. Уравнение (10.11) справедливо для обоих случаев. Преобразованная схема линейного ВТ с вторичным симметрированием приведена, на рис. 10.6.б.
Линейный ВТ с вторичным симметрированием не может быть использован в тех устройствах, где нагрузочное сопротивление ZнАпеременно. Поэтому в практике чаще применяют линейные ВТ с первичным симметрированием.
Как отмечалось, рассмотренные схемы дают линейную зависимость выходного напряжения при изменениях угла поворота ротора в пределах 55o в обе стороны от нулевого положения ротора. Однако если изменения фазы напряжения на угол 180o не требуется, то, вводя в схему смещающее напряжение, взятое от отдельного трансформатора или автотрансформатора, можно вдвое увеличить предел линейного изменения выходного напряжения. Первичной обмоткой смещающего автотрансформатора может служить и обмотка СГ1 — СГ2 самого ВТ.
§ 10.5. Вращающийся трансформатор-построитель
|
|
|
Рис. 10.7. Схема включения (а) и векторная диаграмма потоков (б) ВТ-построителя |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.