Х = | x, y, z, Vx, Vy, Vz, ∆t |Т, где (x, y, z) – пространственные координаты потребителя;
Vx = ∂х/∂t, Vy = ∂у/∂t, Vz = ∂z/∂t – составляющие вектора скорости, которые находятся как производные от координат потребителя повремени;
∆t – величина отклонения шкалы времени потребителя от шкалы времени СРНС.
Непосредственно по принятому от спутника радиосигналу нельзя измерить элементы вектора потребителя. Но можно измерить те или иные параметры радиосигнала (например, время задержки сигнала и доплеровское смещение частоты), которые позволят в дальнейшем найти вектор Х.
Для измерения задержки принятого сигнала из него извлекается содержащаяся в нем информация, которая позволяет установить момент излучения сигнала со спутника. Разность между моментом приема сигнала tприема и моментом излучения его спутникомtизлучения равна задержке сигнала: τ = tприема – tизлучения.
Эффект Доплера – изменение частоты сигнала, регистрируемого приемником, вызванное движением их источника (в нашем случае это спутник) и/или движением самого приемника. Номинальные частоты сигналов всех спутников записаны в памяти приемника. Вычисление отклонения частоты сигнала на входе антенны приемника от номинального значения даст доплеровское смещение частоты fD =fноминальное – fвх.сигнала.
Задержку сигнала τ и доплеровское смещение частоты fD называютрадионавигационными параметрами.
С их помощью находят соответствующие им геометрические параметры – дальность от спутника до объекта R и радиальную скорость сближения объектов Vr:
R = τ·с , Vr = fD · λ , где с – скорость света,
λ – длина волны сигнала, излучаемого навигационным спутником.
Полученные параметры R и Vr являются навигационнымипараметрами.
Чтобы определить вектор Х, используют функциональную связь между навигационными параметрами и компонентами вектора потребителя. Соответствующие функциональные зависимости принято называть навигационными функциями.
Описанную процедуру нахождения вектора состояния потребителя можно изобразить в виде структурной схемы, представленной на рисунке 1.

Рисунок1 – Структурная схема нахождения вектора состояния потребителя
Ключевым является метод вычисления навигационных функций, определяющий варианты выполнения 3-его блока. В следующей лекции будут описаны методы вычисления навигационных функций, применяемые в действующих СРНС.
Далее используем следующие понятия и определения.
Поверхность положения– совокупность точек пространства с одинаковым значением навигационного параметра.
В общем случае поверхностью положения может являться плоскость, сфера и т.д. Для спутниковых систем поверхность положения представляет собой сферу с центром, совпадающим с передающей антенной спутника (рисунок 2). В качестве сохраняющего свое значение навигационного параметра выступает дальность R, совпадающая с радиусом сферы.
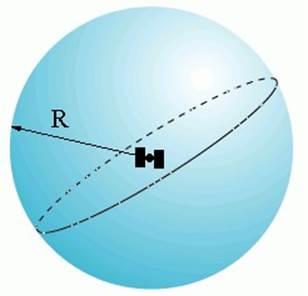
Рисунок 2 – Поверхность положения СРНС
Пересечение двух поверхностей положения образует линию положения.
Линия положения– совокупность точек пространства, имеющих два заданных значения навигационного параметра. Пересечение двух плоскостей дает линию положения в виде прямой, пересечение двух сфер – в виде окружности.
Местоположениеопределяется координатами точки пересечения трех поверхностей положения или, соответственно, двух линий положения.
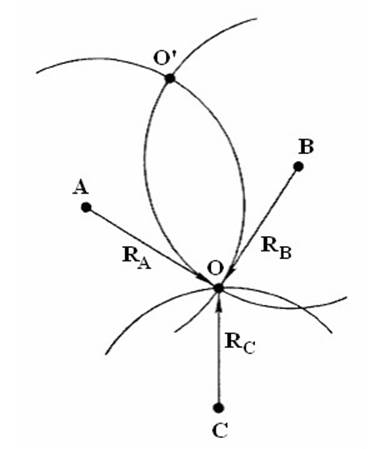
В некоторых случаях, например, в случае окружностей, линии положения могут пересекаться в двух точках. При этом однозначно найти местоположение можно, только используя дополнительную поверхность положения (рисунок 3) или иную информацию о местоположении объекта (например, знание ориентировочных координат потребителя).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.