Линии, для которых разность расстояний от двух точек постоянна, являются гиперболами, поэтому разностно-дальномерный метод называют также гиперболическим. Для определения местоположения объекта требуется два семейства гипербол (рисунок 3). Поэтому для реализации этого метода необходимы три станции: ведущая (на рисунке 3 обозначена как А) и две ведомых (Ви С). Например, если на подвижном объекте определили, что находятся на разности расстояний между станциями А и С, равной 20, и на разности расстояний между станциями А и В, равной -10, то объект находится в точке D .
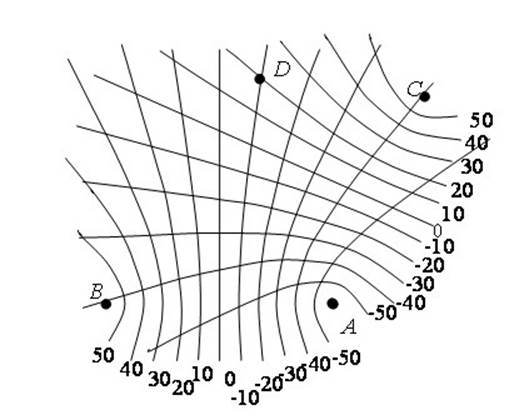
Рисунок 3 – Изолинии разности расстояний до базовых станций
Первой разностно-дальномерной радионавигационной системой была система Лоран (LORAN – Long Range Navigation). Она разработана в США на рубеже 30-х – 40-х годов и введена в эксплуатацию в конце 1942 года на атлантическом побережье США. В системе Лоран-А дальность измерялась импульсным методом. Система Лоран-А обеспечивала определение координат местоположения судна с точностью 1% от дальности в пределах зоны с удалением от станций 300 - 800 морских миль днем и до 1500 морских миль ночью. В дальнейшем (1952-1958 годах) система Лоран была модернизирована (Лоран-С). Она стала импульсно-фазовой. Импульсный методиспользовался для грубого определения местоположения судна, а фазовый – для точного измерения. Лоран-С обеспечивала ошибку измерения до 100 м на дальностях до 1400–2000 миль. В СССР аналогичная РНС "Чайка" была введена в эксплуатацию в 1969 г.
Указанные наземные системы вводились в строй, когда уже началось освоение околоземного космического пространства. После запуска в 1957 г. первого искусственного спутника Земли (ИСЗ) были развернуты основные теоретические и практические работы по использованию искусственных небесных тел в качестве космического ориентира. Фундаментальное значение имела работа, выполненная коллективом советских специалистов под руководством академика В. Котельникова. Проследив за полетом первого спутника, они установили, что, зная параметры орбиты ИСЗ и измерив доплеровский сдвиг частоты его сигнала, можно рассчитать координаты точки, в которой производятся измерения. Этот принцип положен в основу создания спутниковых радионавигационных систем первого поколения – «Цикада» (СССР) и «Транзит» (США).
Модуль 1
Развитие отечественной системы спутниковой навигации
В 1963 г. начались работы по созданию первой отечественной низкоорбитальной навигационной спутниковой системы «Цикада». Вэксплуатацию она была сдана в 1979 г. В состав ее входили четыре спутника, обращающихся на околополярных орбитах высотой 1000 км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяла потребителю в среднем через каждые полтора–два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 6 мин. «Цикада»использовалась для навигации военных и гражданских морских судов.
Оснащение спутниковой навигационной аппаратурой судов торгового флота оказалось очень выгодным, поскольку благодаря повышению точности судовождения удавалось настолько сэкономить время плавания и топливо, что бортовая аппаратура потребителя окупала себя после первого же года эксплуатации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
Выполнить требования всех указанных классов потребителей низкоорбитальные системы в силу принципов, заложенных в основу их построения, не могли. Они давали большие ошибки вычисления координат: часто более 100 метров. Более того, по получаемым измерениям можно было определить только две пространственные координаты. Еще одним недостатком низкоорбитальных систем было отсутствие глобальности покрытия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.