Антенный блоквключает в себя непосредственно антенну и предварительный усилитель с полосовым фильтром (на рисунке 1 обозначен как ПУ/ПФ). Антенна принимает сигналы от НКА, находящихся в зоне радиовидимости. В ПУ/ПФ совокупность принятых сигналов предварительно усиливается и фильтруется во всей полосе частот, которые используются спутниками системы (то есть в полосе от 1593 до 1609 МГц).
Большинство космических радиолиний работает в диапазоне СВЧ, вследствие чего проведение сеансов связи между НКА и приемником оказывается возможным только в течение времени пребывания НКА в зоне его прямой видимости. Зоной радиовидимостиприемника принято считать всю часть околоземного пространства, видимую из приемника при углах возвышения над местным горизонтом более 7° (рисунок 2). В этой зоне обеспечивается устойчивая радиосвязь наземных и бортовых радиосредств и заданная точность траекторных измерений. Однако иногда рассматривают зоны радиовидимости и при углах возвышения менее 7°.
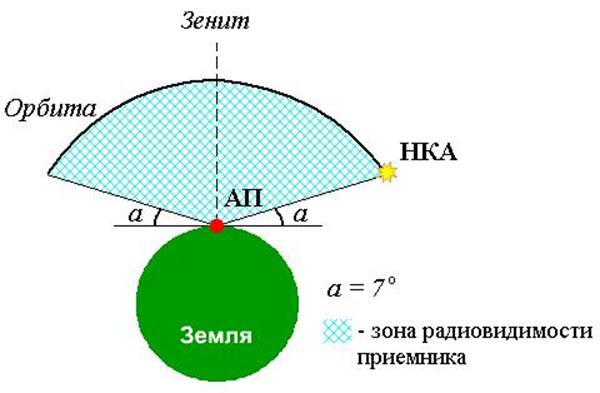
Рисунок 2 – Зона радиовидимости аппаратуры потребителя
Для оценки вектора потребителя необходимы псевдодальности и псевдоскорости, измеренные относительно, как минимум, четырех НКА. То есть приемник должен одновременно принять минимум четыре спутниковых сигнала. Поэтому все навигационные приемники имеют многоканальную структуру(24 канала в обычных приемниках и более 24 в приемниках, работающих одновременно по сигналам нескольких СРНС). Заметим, чтоантенный блок – это единственная частьприемника, которая не является многоканальной.
В радиочастотной частисигналы, принятые антенной, усиливаются и фильтруются. Так как в ГЛОНАСС сигнал от каждого спутника имеет свою несущую частоту, то каждый канал должен быть настроен на частоту сигнала одного из НКА и селектировать (отбрасывать) частоты сигналов других НКА.
Современные приемники являются аналого-цифровыми системами, сочетающими аналоговую (на рисунке аналоговыйприемник – АПр) и цифровую обработку сигналов. После аналого-цифрового преобразования (АЦП) цифровые отсчеты входного сигнала с выхода радиочастотной части поступают на вход цифрового коррелятора. Помимо этого, в радиочастотной части формируется тактовая частота для цифровой части приемника.
Измерения параметров сигнала в приемнике производятся путем сопоставления входного сигнала с его точной копией, которую называют опорным сигналом и формируемым цифровым опорным генератором. В корреляторе происходит выделение входного сигнала наиболее близко совпадающего с опорным сигналом. Управление работой опорного генератора осуществляется по сигналам, поступающим от процессора. Опорный генератор – это один из важнейших элементов приемника, от стабильности его частоты зависят точностные характеристики и надежность аппаратуры потребителя.
В N-канальном коррелятореоценивается степень связи (или похожести) опорного и входного сигналов, то есть происходит идентификация сигнала спутника. А также корреляционная обработка позволяет выбрать среди всех принятых спутниковых сигналов наименее зашумленные и наиболее мощные сигналы.
Приемник работает в двух основных режимах: поиска и обнаружения сигналов от НКА по частоте и задержке и непрерывного слежения. Как отмечалось, оба режима относятся к алгоритмам первичной обработки.
В режиме поиска сигнала производится «грубая» оценка его параметров – задержки τ (оценивается в N -канальном корреляторе путем определения временного сдвига входного сигнала относительно опорного) и доплеровского смещения частоты fD. Это позволяет осуществить захват сигнала, то есть перейти к непрерывному слежению за сигналом. После захвата происходит уточнение полученных на этапе поиска параметров τ и fD. Эти«уточненные» данные используются затем для вычисления псевдодальностей и псевдоскоростей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.