На рисунке 1,а показан угломерный принцип определения местоположения подвижного объекта О по пеленгам a1 и a2радиопеленгаторов P1 и P2. Из решения треугольников известно, что положение точки O однозначно определяется по стороне B, обычно называемой базой, и прилежащим к ней углам. Так как пеленг определяется с ошибкой (пунктирные линии), то и местоположение объекта также определяется с ошибкой (затененный четырехугольник). Причем ошибка определения местоположения увеличивается с увеличением расстояния от объекта до радиопеленгатора.
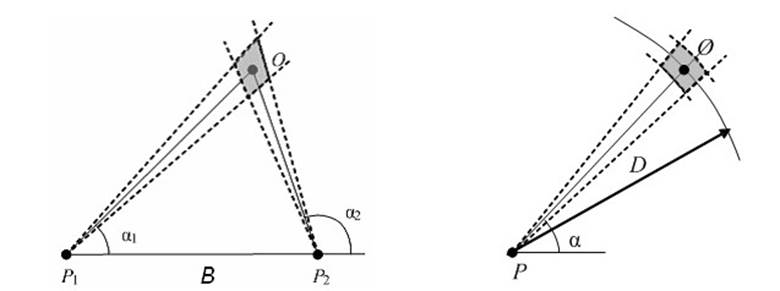
а) ...........................................................б)
Рисунок 1 – Принцип определения местоположения подвижного объекта: а) угломерный метод; б) угломерно-дальномерный метод
Корабль мог и сам измерить свои координаты при наличии на корабле радиопеленгатора. В этом случае координаты корабля рассчитывались по пеленгам двух радиомаяков, координаты которых были известны.
Угломерно-дальномерный методпроиллюстрирован на рисунке 1,б . Для определения местоположения объекта О нужно знать три параметра: пеленг а (определялся радиопеленгатором); координаты радиомаяка Р (известны заранее); расстояние D (измеряли акустическим устройством). Принцип радиоакустического измерения состоял в том, что радиосигнал радиомаяка и звуковой сигнал начинали излучаться одновременно. Скорости распространения радиосигнала с и звукового сигнала v разные, поэтому звуковой сигнал принимался на корабле с задержкой на величину ∆t=D/v–D/c. А так как c>>v , то отбросив величину D/c расстояние между кораблем и радиомаяком D≈v∙∆t. Максимальная дальность действия радиоакустического измерителя ограничивалась дальностью распространения звука, в воде она равна 12–15 миль. Ошибка измерения координат составляла сотни метров.
Однако, угломерные системы непригодны для построения систем дальней навигации, так как линейная ошибка определения местоположения объекта растет пропорционально расстоянию. Для радионавигационных систем большой дальности требовались новые методы. Развитие радиолокации во второй половине 1930-х годов привело к разработке более точных дальномерных методов, в частности импульсного метода. Важно было то, что методическая ошибка измерения дальности не зависела от самой дальности. Достижения радиолокации использовались при построении радионавигационных систем средней и большой дальности.
В конце 1930-х годов (1937-1938 годах) в США начала разрабатываться система радионавигации, обладающая высокой точностью и дальностью действия до 400 км. В дальнейшем эта система получила название Шоран (SHORAN - Short Range Navigation). В ней использовался дальномерный методопределения местоположения (рисунок 2).
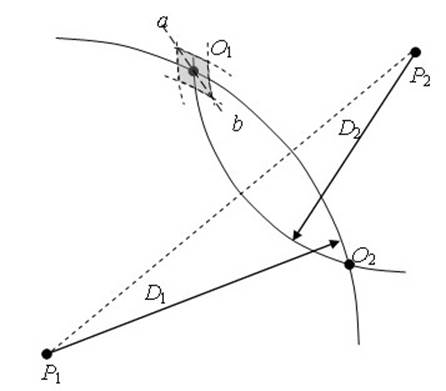
Рисунок 2 – Принцип дальномерного позиционирования(дальномерный метод)
В систему Шоран входят самолетный запросчик и две наземных ответных станции. Запросчик (на рисунке обозначен как объект О) излучает короткие радиоимпульсы. Ответные станции (Р1 и Р2), приняв эти импульсы, ретранслируют их обратно на самолет. На самолете по задержке принятых импульсов измеряется дальность (D1и D2) до каждой из наземных станций и находится местоположение самолета. Чтобы измерение было однозначным, надо заранее знать с какой стороны от линии Р1Р2 находится объект. Первоначально эта система разрабатывалась для слепого бомбометания.
Но при больших расстояниях дальномерный метод тоже давал значительные ошибки. С увеличением расстояния и при уменьшении угла пересечения линий постоянной дальности линейная ошибка в направлении линии ab (рисунок 1,б) увеличивается. Выход был найден в использовании разностно-дальномерного метода, основанного на измерении разности расстояний от объекта до радиостанций (D1 – D2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.