В реальных условиях на точность определения вектора потребителя значительное влияние оказывают факторы, которые в зависимости от их происхождения можно разделить на три группы:
· Ошибки системы
· Ошибки связанны с распространением навигационного сигнала
· Ошибки приемной аппаратуры
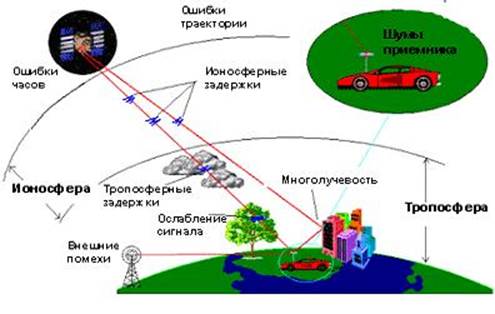
Рисунок 1
Ошибки системы связаны с точностью бортовых часов спутников исоответствием реальной траектории спутников заданной орбите. Несмотря на то, что в каждом спутнике используются высокоточные часы, они тоже могут содержать ошибки и отклоняться от истинного значения системного эталона времени. Временной сдвиг в 1 мс может привести к эквивалентной дальномерной погрешности в 300 км. Поэтому, все отклонения бортовых часов отслеживаются и их значения передаются в составе навигационных сообщений и учитываются навигационным приемником в вычислениях позиции. Второй тип системных ошибок связан с неточностью передаваемых предвычисленных траекторий орбит спутников ‑ эфемерид. Эфемеридная погрешность возникает в результате расхождения фактического положения спутника с его расчетным положением. Как правило, значение этой погрешности не превышает (2…3) м. Вычисление элементов орбиты всех спутников осуществляется наземным комплексом управления. Уточненные параметры сводятся в альманах и передаются на спутники, которые, в свою очередь, пересылают эти данные в аппаратуру потребителей. Неточность определения параметров орбиты и непрогнозируемые смещения спутника учитываются в математических моделях, но небольшие ошибки все равно присутствуют.
Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала в атмосфере Земли, а именно в ионосферных и тропосферных ее слоях (рисунок 2). Основная составляющая ионосферных и тропосферныхпогрешностей навигационных определений обусловлена наличием рефракции. Рефракциясигналов вызвана неоднородностями и изменением диэлектрической проницаемости и соответственно показателя преломления с изменением высоты. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Повышенная и неподдающаяся точному учету концентрация заряженных частиц в ионосфере снижает скорость распространения сигнала, увеличивая тем самым время его распространения. Соответственно вносится ошибка в оценку расстояния от приемника до спутника. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, расположенный у поверхности Земли и до высоты в 12-18 км. В тропосфере происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Это вносит дополнительные ошибки в оценку расстояния от приемника потребителя до спутника. Этим задержкам соответствуют ошибки определения местоположения около 20…30 м днем и около 3…6 м ночью. Такие задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но эти модели не могут точно отобразить реальную ситуацию.
Существуют методы коррекции погрешностей, вносимых ионосферой. Первый заключается в коррекции ошибки при некотором типичном состоянии ионосферы, для которого эти задержки моделируются для разного времени суток и вносятся в алгоритмы измерения.
Второй метод заключается в сравнении скорости распространения систем на разных частотах. Этот метод доступен при использовании двух и более частот для передачи навигационных сигналов.
Третий метод уменьшения ионосферных задержек используетдифференциальные системы, включающие дополнительные наземные радионавигационные точки (псевдолиты). Этот метод будет рассмотрен более подробно в следующем пункте.
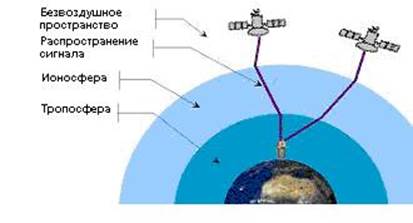
Рисунок 2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.