СРНС часто используются в условиях интенсивных помех, существенно снижающих точность позиционирования. В курсе «Радионавигационные системы» студенты практически изучают особенности приема и обработки сигналов системы ГЛОНАСС, в том числе в условиях помех. Лабораторная установка для экспериментального исследования состоит из навигационного приемника потребителя, персонального компьютера и генератора помех (типа SEL SP-21 – Баррикада), формирующего заградительные активные шумовые помехи в диапазоне частот (0,01…2000) МГц. В ее состав может также включаться измеритель уровня помех (типа АМ-9010). Состав аппаратуры лабораторного макета показан на рисунке 1.

Рисунок 1 - Состав аппаратуры лабораторного макета
Лабораторная установка может иметь различные варианты построения, отличающиеся типом навигационного приемника, характеристиками компьютера и особенностями программного обеспечения. Элементы аппаратно-программного комплекса (приемник, компьютер и программное обеспечение) осуществляют обработку навигационной информации.
В настоящее время наиболее широко представлены на рынке приемники СРНС, работающие в диапазоне L1. Одним из наиболее наглядных и удобных для проведения цикла лабораторных работ по спутниковой навигации является комплект аппаратуры приемника разработчика EVK-5 u-blox 5 Evaluation Kits (рисунок 2). Комплект включает установленную в корпусе отладочную плату с навигационным приемником и стабилизатором питания, кабель для подключения к компьютеру, активную антенну, CD - диск с подробной документацией и дистрибутивом программы u-Center, которая позволяет использовать персональный компьютер в качестве устройства управления и отображения информации.
Комплект EVK-5 u-blox 5 конфигурирует приемник сигналов, поддерживает протокол NMEA, позволяет отображать навигационную информацию в реальном масштабе времени, записывать и воспроизводить полученные данные, представлять графическую информацию.
Для выполнения лабораторной работы достаточными являются следующие требования к персональному компьютеру: тактовая частота процессора не менее 600 МГц и ОЗУ не менее 512 Мб. Обеспечивается работа в операционных системах Windows и Linux.
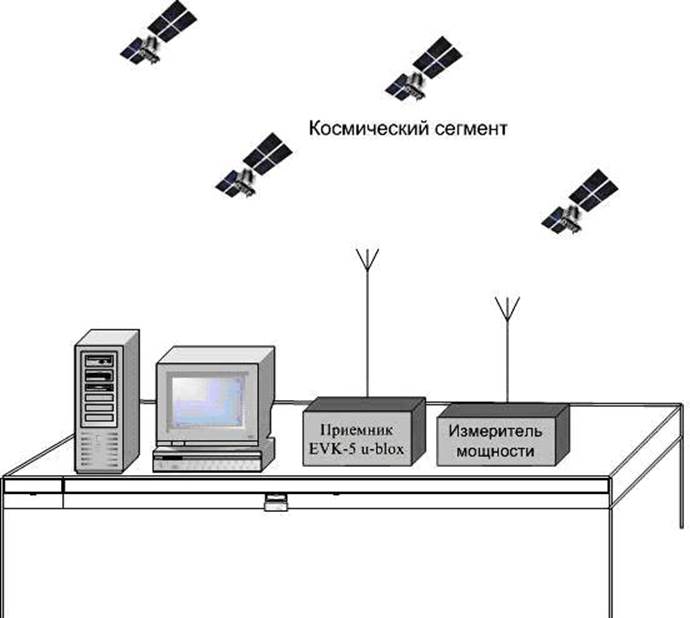
Рисунок 2 - Общий вид лабораторной установки
Ниже в таблице приведены характеристики навигационного приемника EVK-5 u‑blox 5.
|
Число каналов приема |
50 параллельных каналов |
|
Скорость обновления данных |
4 раза в секунду |
|
Рабочая частота |
L1 - 1575,42МГц |
|
Точность измерения |
2,5 м (с вероятностью 50 %) в режиме 2D |
|
5 м (с вероятностью 50 %) в режиме 3D |
|
|
Время старта |
Горячий старт: 1 c |
|
Теплый старт: 29 c |
|
|
Холодный старт: 29 c |
|
|
Чувствительность |
- 144 дБм при обнаружении сигнала |
|
- 160 дБм при слежении |
|
|
Протоколы обмена |
NMEA, RTCM, UBX |
В состав программного обеспечения включена вспомогательная, свободно распространяемая программа Orbitron, отображающая положение относительно позиции АП функционирующих в настоящее время НИСЗ ГЛОНАСС и GPS. Также в программу загружены карта и космический снимок фрагмента района нахождения РГРТУ.
· ТЕМА 11 Сравнение системы ГЛОНАСС с другими СРНС
Системы ГЛОНАСС, GPS NAVSTAR, Beidou, Galileo
На сегодняшний день можно назвать 4 спутниковых навигационных системы: российская ГЛОНАСС, американская GPS NAVSTAR, европейская Galileo и китайская Beidou 2 (Compass). Системы Galileo и Beidou 2 находятся на стадии сооружения.
Проведем сравнение технических параметров системы ГЛОНАСС с параметрами этих четырех систем. Основные различия сведем в таблицу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.