






























Движение реального механизма всегда отличается от движения теоретического (идеального) механизма. Это характерно и для исполнительных устройств промышленных роботов. При выполнении технологической операции действительное движение рабочего органа отличается от расчетного. Его положение, скорость и ускорение в любой точке реализуемой им траектории в общем случае могут не совпадать с расчетными. Разность между действительным и расчетным положениями рабочего органа называют погрешностью позиционирования исполнительного устройства промышленного робота. Погрешность позиционирования характеризует точность ПР и является одной из основных характеристик ПР. Основными причинами возникновения погрешности позиционирования являются:
- первичные ошибки;
- ошибки обобщенных координат.
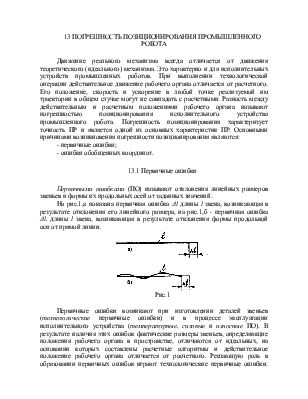
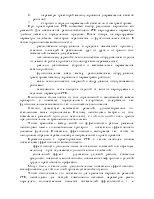
Первичными ошибками (ПО) называют отклонения линейных размеров звеньев и формы их продольных осей от заданных значений.
На рис.1,а показана первичная ошибка Δlдлины l звена, возникающая в результате отклонения его линейного размера, на рис.1,б - первичная ошибка Δl. длины lзвена, возникающая в результате отклонения формы продольной оси от прямой линии.

Рис.1
Первичные ошибки возникают при изготовлении деталей звеньев (технологические первичные ошибки) и в процессе эксплуатации исполнительного устройства (температурные, силовые и износные ПО). В результате наличия этих ошибок фактические размеры звеньев, определяющие положения рабочего органа в пространстве, отличаются от идеальных, на основании которых составлены расчетные алгоритмы и действительное положение рабочего органа отличается от расчетного. Решающую роль в образовании первичных ошибок играют технологические первичные ошибки. На величину первичных ошибок имеются специальные стандарты (допуски), ограничивающие их максимальные значения.
Результат действия каждой первичной ошибки на величину погрешности позиционирования рабочего органа промышленного робота можно определить независимо от действия других первичных ошибок. Значение результирующей погрешности позиционирования вычисляют в соответствии с принципом суперпозиции.
Первичные ошибки делят на систематические и случайные, скалярные и векторные.
Систематическими называют ошибки, которые во всех деталях данной партии остаются постоянными. Причины возникновения систематических ошибок могут быть обнаружены и устранены.
Случайными называют ошибки, которые во всех деталях данной партии имеют различные значения. Они возникают при действии многочисленных, не поддающихся учету причин, связанных с оборудованием, инструментом, качеством материала, состоянием внешней среды и квалификацией рабочего. Под влиянием этих факторов происходит рассеивание действительных размеров относительно номинальных.
Скалярные первичные ошибки относят к параметрам звена, имеющим определенное номинальное значение (например, ошибка размера звена). В конкретном экземпляре партии одинаковых механизмов каждая скалярная ошибка имеет вполне определенное значение, знак и направление. Во всей партии та же ошибка случайна, так как ее значение изменяется в пределах допуска от одного экземпляра к другому.
Векторные первичные ошибки относят к нулевым параметрам механизмов, т.е. к параметрам, номинальные значения которых равны нулю (например, эксцентриситет). Они характеризуются модулем и направлением и всегда случайны, так как их направления становятся известными только после образования механизма.
Погрешности обобщенных координат включают в себя ряд ошибок.
1. Ошибка ввода обобщенной координаты. Для осуществления движения рабочего органа необходимо от системы управления при помощи автономных двигателей задать движения нескольким или всем звеньям исполнительного устройства промышленного робота. Так как система управления и двигатели работают с погрешностями, то в результате управление осуществляется неточно и действительные движения звеньев отличаются от расчетных. Разность между действительным и расчетным значением обобщенной координаты, вызванная погрешностью работы системы управления и двигателя представляет собой ошибку ввода обобщенной координаты Δq"j.
Ошибки ввода являются случайными величинами не зависящими от конфигурации исполнительного устройства ПР и их определяют независимо для каждого звена. Учет взаимного расположения звеньев необходим только на этапе суммирования.
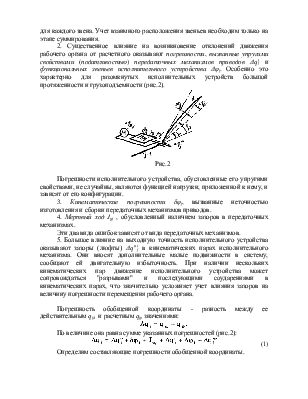
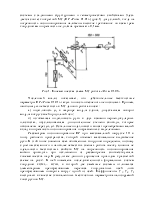
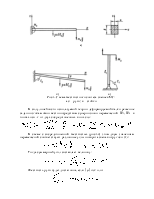
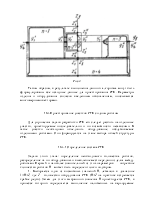
2. Существенное влияние на возникновение отклонений движения рабочего органа от расчетного оказывают погрешности, вызванные упругими свойствами (податливостью) передаточных механизмов приводов Δq'j и функциональных звеньев исполнительного устройства Δφj. Особенно это характерно для разомкнутых исполнительных устройств большой протяженности и грузоподъемности (рис.2).
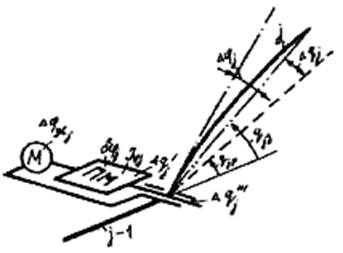
Рис.2
Погрешности исполнительного устройства, обусловленные его упругими свойствами, не случайны, являются функцией нагрузки, приложенной к нему, и зависят от его конфигурации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.