При геометрическом согласовании параметров робота и оборудования неоднократно проверяется соударение робота с оборудованием. Проверка может выполняться либо графически (с помощью планшетов), либо аналитически. В последнем случае формы и размеры руки робота могут быть описаны так же, как и оборудование. Для этого введем систему координат схвата робота ХсYсZс с началом Ос в центре губок схвата (рис.1).
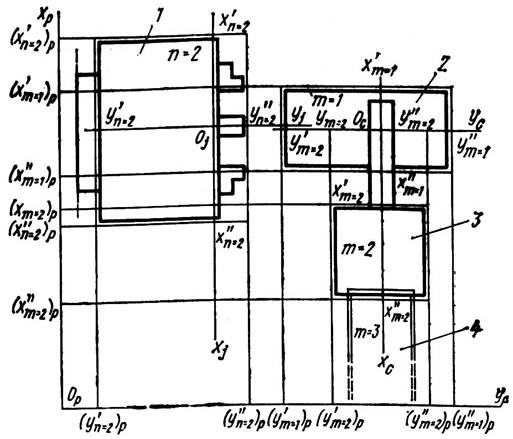
Рис.1
Ось Zс направлена вертикально (на рисунке не показана), а ось Yс – параллельно движению перемещения между оборудованием. Все элементы руки (кисть 4, схват 3 и изделие 2 в нем) аппроксимируем М-параллелепипедами с гранями, параллельными осям ХсYсZс. Размеры и расположение каждого такого m-го параллелепипеда {m=1, 2, ..., М} описываются координатами его граней х'тy'тz'т, х"тy"тz"т относительно системы координат руки робота ХсYсZс.
Проверка отсутствия соударения робота и оборудования при данном положении схвата сводится к выяснению, накладывается ли какой-нибудь m-й элемент робота на любой n-й элемент оборудования (m=1, 2,.... M; n=1, 2,... N).
Признаком отсутствия взаимного наложения m-го элемента робота на n-й элемент оборудования является превышение любой из наименьших координат х", у", z" одного элемента над соответствующей наибольшей координатой х', у', z' другого.
Чтобы сопоставить положение элементов робота и оборудования, необходимо иметь их описание в единой системе координат. В данном случае удобно использовать систему координат робота ХрYрZр. Сначала в эту систему координат пересчитываются координаты граней параллелепипедов, аппроксимирующих элементы оборудования (например, патрона 1, см. рис.1), следующим образом:
![]() (1)
(1)
где
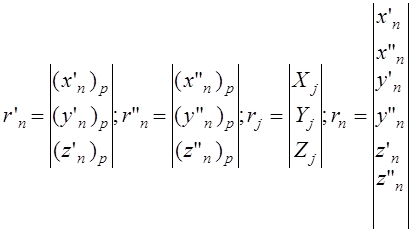
(x'n)р, (у'n)р, (z'n)р – координаты граней параллелепипеда, наиболее удаленного в положительном направлении осей ХрYрZp робота;
(x”n)р, (у”n)р, (z”n)р – аналогичные координаты соответствующих наименее удаленных граней;
ХjYjZj – координаты начала системы координат j-го оборудования относительно системы координат робота ХрYрZp (на данной стадии проектирования ХjYjZj могут быть приняты произвольными);
х'n, х"n, у'n, у"n, z'n, z"n – координаты граней параллелепипедов, аппроксимирующих элементы оборудования, относительно системы координат оборудования ХjYjZj;
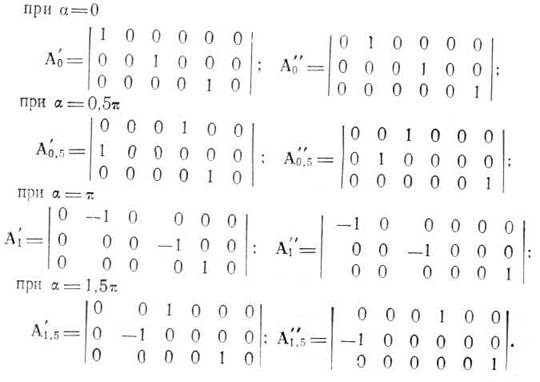
![]() – матрицы преобразования
координат при повороте на угол α системы координат оборудования
относительно системы координат робота ХрYрZр
соответственно для максимально и минимально удаленных граней:
– матрицы преобразования
координат при повороте на угол α системы координат оборудования
относительно системы координат робота ХрYрZр
соответственно для максимально и минимально удаленных граней:
После пересчета координат граней аппроксимирующих элементов в систему координат робота определяют текущие положения начала системы координат схвата относительно системы координат робота по соотношениям
![]()
![]() (2)
(2)
где
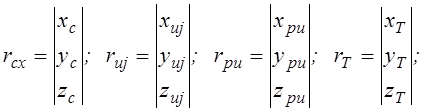
хс, yс, zс –координаты точки Ос относительно системы ХрYрZp;
хиj, yиj, zиj –координаты центра Ои изделия, установленного в оборудование или сразу после съема с него;
хри, yри, zри – координаты места захвата и соответственно центра схвата относительно систем ХиYиZи изделия;
xт yт zт – текущее смещение схвата робота (при перемещениях по траекториям манипулирования) в направлении соответствующих осей координат робота ХрYрZp относительно своего исходного положения в момент окончания установки или съема изделия с оборудования;
– матрица преобразования координат, отражающая поворот на угол α оборудования относительно робота;

– матрица преобразования координат, отражающая различные виды ориентации изделия относительно оборудования.
Далее для каждого рассчитанного таким образом положения схвата определяются координаты элементов робота по следующим соотношениям:
 (3)
(3)
где (х'т)р, (у'т)р, (z'm)р – координаты граней m-го параллелепипеда, наиболее удаленные в положительном направлении осей координат робота;
(х"т)р, (у"т)р, (z"т)р – аналогичные координаты соответствующих наименее удаленных граней аппроксимирующих параллелепипедов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.