Что же касается неидеальной жесткости исполнительных приводов, то она проявляется для исполнительных систем, описываемых статическими передаточными функциями. Если ограничиться классом следящих систем с астатизмом, то соответствующей не идеальностью жесткости системы можно пренебречь.
Следует иметь в виду, что если в формировании коэффициента жесткости Cij, участвуют две причины: нежесткость звена и нежесткость передачи, то эквивалентный коэффициент необходимо рассчитывать исходя из последовательного соединения соответствующих упругих элементов, например при ротации
 . (24)
. (24)
Таким образом, для определения четырех или пяти (но не
шести) коэффициентов жесткости достаточно задать всего три
первичных параметра: а , b , М . При этом в пределах принимаемых
допущений определяются не только масса звена, но и его центр масс. В результате
рассчитывается значение функции качества K2(![]() ) и конкретизируется нагрузка на звено.
Решение задачи статики для звена с выбранной жесткостью позволяет оценить погрешности
позиционирования и ориентирования звена на соответствие заданным ограничениям.
) и конкретизируется нагрузка на звено.
Решение задачи статики для звена с выбранной жесткостью позволяет оценить погрешности
позиционирования и ориентирования звена на соответствие заданным ограничениям.
На практике могут наблюдаться сочетания факторов, когда весьма высоки требования и по составу точностных ограничений (например, ограничения по всем трем координатам), и по величинам допустимых погрешностей. При этом может оказаться, что реальные жесткостные параметры конструкции ПР не смогут обеспечить выполнение требований по точности, и возникает задача доработки конструкции робота. Чтобы принять решение о направлениях такой доработки, необходимо провести жесткостной синтез манипуляционной системы с заданными структурными и геометрическими свойствами. Здесь дается синтез конкретной МС (ПР «Ритм-01.01») (рис.1) для условий, когда на погрешность позиционирования наложены высокие требования: по всем трем координатам погрешность не должна превышать 0,1 мм.
Рис.1. Кинематическая схема МС робота «Ритм-01.01»
Численный анализ показывает, что действительные жесткостные параметры ПР «Ритм-01.01» такую точность обеспечить не позволяют. Причем, наибольшую не жесткость в МС данного робота вносят:
а) податливость j1 в шарнире модуля сдвига, допускающая поворот модуля вокруг своей продольной оси;
б) изгибающая податливость руки в двух взаимно-перпендикулярных плоскостях, обусловливающая дополнительные степени свободы, которые обозначены через j2, j3. Остальные податливости вносят пренебрежимо малый вклад в погрешность позиционирования по сравнению с выделенными.
Рассмотрим позиционирование ПР при максимальной нагрузке 1Н в точку рабочего пространства, которой отвечает максимальное выдвижение руки. В этой точке значения всех обобщенных координат определены, поэтому с учетом сказанного о наиболее нежестких звеньях робота оценку влияния не идеальности жесткостных свойств МС на погрешность позиционирования можно проводить при исключении из рассмотрения соответствующих кинематических пар. В результате данного упрощения приходим к расчетной схеме на рис.2. В ней помещена последовательность формальных систем координат x0y0z0,... x5y5z5, в которой две смежные системы отличаются элементарным преобразованием переноса координатных осей либо преобразованием поворота вокруг одной из осей. Коэффициенты С1, С2, С3 выступают в качестве эквивалентных жесткостных параметров анализируемой конструкции МС.
Рис.2. Расчетная схема ПР для точностного синтеза
Абсолютные координаты центра схвата А связаны с величинами j1, j2, j3 зависимостями, которые можно записать в виде одного матричного соотношения
Х=M01(M23M34L45+L12), (1)
где с учетом малости j1, j2, j3 имеем
В развернутом виде эти зависимости принимают форму (величина l2j1j2, отброшена как малая второго порядка):
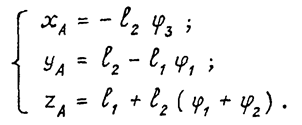 (2)
(2)
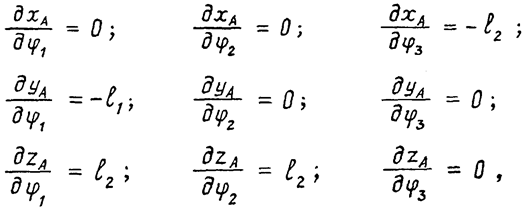
Теперь можно определить частные производные функции положения по j1, j2, j3:
и вычислить соответствующие погрешности позиционирования схвата:
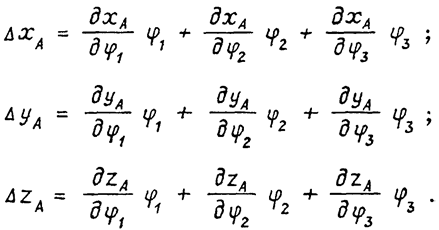 (3)
(3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.