K1(![]() )=
)= (eij/Рij) ® max (7)
(eij/Рij) ® max (7)
Особенность этого критерия – линейность.
Решение задачи (4), (5) определяет максимально допустимые погрешности eij >0 для каждого звена. Выясним конкретный вид связи eij c eAj . Обозначим через jij обобщенную координату, соответствующую максимальной погрешности eij ; jAj – координату, соответствующую погрешности eAj и разложим jAj (j i j) по степеням jij в окрестности jij = 0 , ограничиваясь в записи линейными членами:
jAj»(¶jAj/¶jij)×jij, (j=1,6)
Наименее благоприятна ситуация, когда все слагаемые двойной суммы имеют один знак. Обозначая
![]() |jij|=eij, |jAj|=eAj, приходим к соотношениям:
|jij|=eij, |jAj|=eAj, приходим к соотношениям:
eAj»(¶jAj/¶jij)×eij£eAjo, (j=1,6) (8)
Целевая функция (7) с линейными ограничениями (8) образуют задачу линейного программирования, для которой размерность 6n не является большой.
Если же использовать в качестве целевой функции не взвешенный аддитивный критерий (7), а монотонную по любому направлению в евклидовом пространстве размерности 6n функцию (6), то приходим к задаче выпуклого программирования, для которой данную размерность также нельзя считать чрезмерно большой, поскольку экстремум расположен также на границе области, а область ограничена многогранником.
Решением задачи верхнего уровня – задачи точностного синтеза МC – назначается для каждого звена i шесть ограничений по погрешности позиционирования:
eij(![]() )½A £ei jo
(j=1,6) (9)
)½A £ei jo
(j=1,6) (9)
На нижнем уровне оптимизации проектируется жесткость звена, то есть определяются параметры жесткости
Cij >0 (j =1,6) (10)
дающие экстремум функции качества
K2(![]() ) ®
extr. (11)
) ®
extr. (11)
Это задача нелинейного программирования; ее размерность не более шести и поэтому она может быть эффективно решена с применением вычислительной техники.
После решения задачи проектирования жесткости звена (9) – (11) для каждого i=1,n рассчитываются коэффициенты Рij, вновь решается задача верхнего уровня, и т.д. до получения устойчивого решения.
При менее строгом подходе коэффициенты Рij могут быть получены посредством обработки статистического материала либо назначены проектировщиком на основе экспертных оценок. Тогда задача проектирования жесткости МС распадается на последовательность двух задач: задачу точностного синтеза МС и задачу проектирования жесткости для каждого звена.
Первая задача довольно подробно представлена соотношениями (6) – (8).
Решение задачи проектирования жесткости звеньев представляет большие трудности, чем задача оптимизации точности МС. В этой связи наибольший интерес представляют два аспекта:
1) связь коэффициентов жесткости с погрешностью .позиционирования;
2) вычисление функции качества.
Для выявления связи![]() с
с ![]() необходимо решить задачу статики твердого
тела для звена i, а, следовательно, знать распределение
нагрузки по звену. При отбрасывании связей - смежных звеньев, их воздействия
заменяем реакциями связей (рис. 2).
необходимо решить задачу статики твердого
тела для звена i, а, следовательно, знать распределение
нагрузки по звену. При отбрасывании связей - смежных звеньев, их воздействия
заменяем реакциями связей (рис. 2).
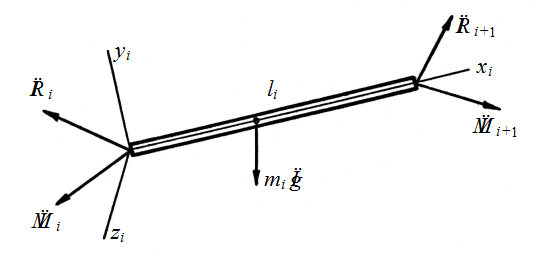
Рис.2. Схема сил, действующих на звено
Кроме реакций смежных звеньев звено нагружено силой тяжести mig¯ . Поскольку для звена i = n нагрузка на правом конце задана (это сила тяжести объекта манипулирования), то решать задачу следует в первую очередь для последнего звена и далее в последовательности от схвата к стойке. В результате определяются реакции R¯ i, M¯ i, через которые и рассчитываются коэффициенты жесткости, поскольку
Rx = Cxxd xx, Ry = Cyyd yy, Rz = Czzd zz,
Mx = Cyzj yz, My = Cxzj xz, Mz = Cxyj xy. (12)
где d xx, d yy, d zz – перемещения левого конца звена в направлении соответствующих осей, вызывающие соответствующие деформации пружин; jyz, jxz, jxy – величины закручивания пружин, отвечающих на повороты звена. Индекс i для краткости опущен.
Погрешности
![]() связаны с перемещениями зависимостями:
связаны с перемещениями зависимостями:
e xx=½d xx½, e yy=½d yy½, e zz=½d zz½
e xy=½j xy½, e xz=½j xz½, e yz=½j yz½ (13)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.