- силу, направленную вдоль оси шатуна, сжимающую или растягивающую его в зависимости от знака силы
![]()
Pш можно разложить на:
- касательную силу
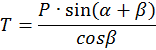
- радиальную силу
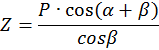
Угол β определяется из условия ![]()
Крутящий момент, действующий на КШМ одного цилиндра:
![]()
3.4 Выбор схемы заклинки кривошипов, порядка работы цилиндров и уравновешивание двигателя.
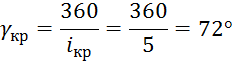
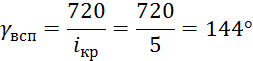
При нечетном числе цилиндров в блоке схема коленчатого валаможет быть только равномерной продольно – нессиметричной, не зависимо от тактности двигателя. Выбранная компоновочнаяй схема – число цилиндров i=5, двигатель одноблочный (5 цилиндров в ряд). Из условия обеспечения равенства между вспышками в цилиндрах двигателя углы между кривошипами и вспышками в двигателе:
Заклинку кривошипов двигателя выбираем из условия наиболее благоприятного чередования вспышек в цилиндрах двигателя. Направление вращения вала, если наблюдать двигатель со стороны, противоположной отбору мощности, по часовой стрелке. Порядок работы цилиндров по блоку при выбранной схеме расположения кривошипов вала и известном направлении его вращения определяется по мере проворачивания схемы кривошипов вокруг оси коленчатого вала. При этом вспышки назначаются с приходом кривошипов в В.М.Т. цилиндров блока. Назначим следующий порядок работы цилиндров двигателя:
|
1 |
144 |
2 |
144 |
4 |
144 |
5 |
144 |
3 |
144 |
1 |
Вспышки в цилиндрах двигателя происходят через равные интервалы (144°), вследствие чего выходной крутящий момент оказывается равномерным. График выходного крутящего момента представлен на рисунке 32.
Уравновешивание двигателя рассматривается только с учётом воздействия сил инерции возвратно-поступательно движущихся и вращающихся неуравновешенных масс (ПДМ и ВНМ) и продольных моментов этих сил, действующих в плоскостях, проходящих через ось коленчатого вала.
Для анализа динамических свойств выбранной схемы строим векторные диаграммы сил PR, CI, CII (рис. 27).
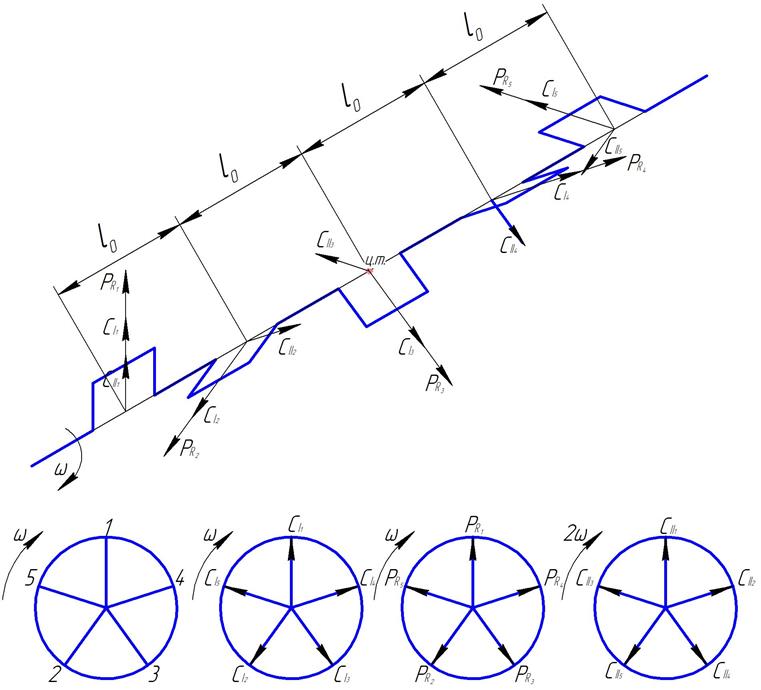
Рисунок 27 Схема заклинки кривошипов коленчатого вала и направление действия сил, действующих в КШМ..
Все диаграммы имеют схему пятиконечной звезды, следовательно, векторные многоугольники всех сил по форме будут одинаковы. На рисунке 28 показан векторный многоугольник сил CI. Векторный многоугольник замкнут, следовательно, результирующий вектор равен нулю и сумма сил равна нулю, т.е.
![]()
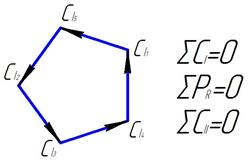
Рисунок 28 Векторный многоугольник сил CI
Каждая неуравновешенная вращающаяся масса mR развивает центробежную силу
PR = mR × R × w2, радиус-вектор которой направлен по радиусу соответственного кривошипа и вращается вместе с ним вокруг оси коленчатого вала с угловой скоростью w в плоскости осей цилиндров рассматриваемого отсека двигателя.
Каждая поступательно движущаяся масса развивает действующую вдоль оси соответственного цилиндра силу инерции, которая может быть определена в виде двух составляющих сил инерции первого и второго порядков:
![]()
где PI – силы инерции первого порядка;
PII – силы инерции второго порядка.
Шесть условий полной динамической самоуравновешенности двигателя – равенство нулю результирующих сил инерции и продольных моментов от этих сил:
Выбрав полюс в центре вала (на пересечении оси третьего цилиндра с осью коленчатого вала), определяем величину действующих моментов:
![]()
![]()
![]()
Откладывая в масштабе векторы этих моментов с учетом их направления, находим результирующие векторы моментов (рис. 29).
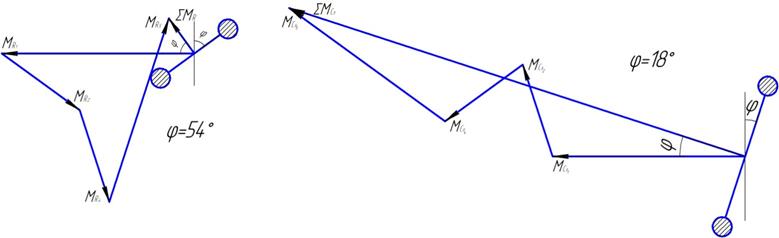
Рисунок 29 Результирующие векторы моментов
Величина и направление результирующего вектора находится изрешения многоугольника или непосредственным измерением. Измерив его и умножив на масштаб определяем велечину неуравновешенного результирущего момента. В данном случае величина неуравновешенного результирующего момента и угол, который составляет плоскость действия этого момента с плоскостью осей цилиндров, соответственно равны:
![]()
![]()
Реально действующие неуравновешенные моменты первого и второго порядка равны:
![]()
![]()
где mR – массы, совершающие вращательные движения вокруг оси коленчатого вала с постоянной скоростью ω (НВМ);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.