Это частный случаи уравнения вида:
y=ax+b
Здесь b либо имеет нулевое значение, либо играет роль начального смещения, а а — чувствительность. Время установления ts равно нулю, а ширина полосы f0 равна бесконечности. В действительности, конечно, на очень высоких частотах чувствительность уменьшается, и у этого много причин (упругость, масса, паразитная емкость и т. д ); поэтому часто говорят, что такие системы являются системами квази-нулевого порядка. Это означает, что реакция таких систем является мгновенной в том диапазоне частот, который существенен при измерении данной величины. Систему, изображенную на рис. 2.38(b), также можно считать системой нулевого порядка. Выходное напряжение датчика Холла VH пропорционально току IH, протекающему по пластине Холла и индукции В магнитного поля, образуемого центральным проводником.
Кроме того, будет иметь место начальное смещение V0. В разделе 3.2.3 будет показано, что
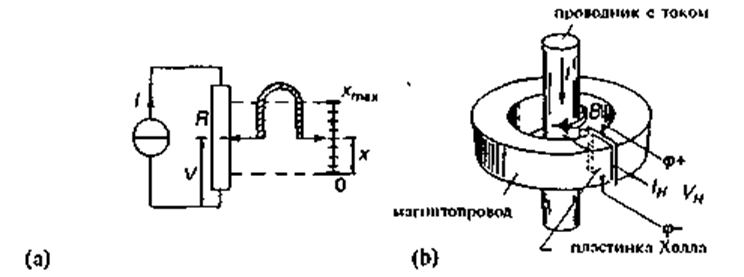
Рис 2 38 Системы нулевого порядка (а) потенциометрический преобразователь смещения и (b) датчик тока.
Здесь RH — постоянная Холла для данной пластины, а t — ее толщина Поскольку значение В пропорционально току, текущему по центральному проводнику, такой датчик исключительно удобен для измерения больших токов. Он позволяет осуществить такое измерение, не разрывая проводник для подключения пробника, который внес бы дополнительное сопротивление.
Системы первого порядка
Кроме того,
Поэтому
Другой пример системы первого порядка — это RС-цепь, приведенная на рис. 2.39(b). Пусть Vi и V0 — входное и выходное напряжения. С учетом того, что
![]()
и
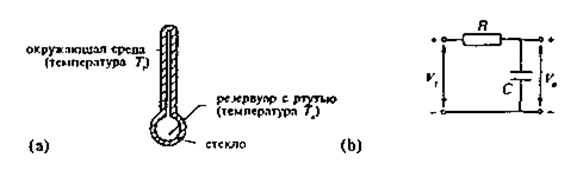
Рис. 2.39. Два примера систем первого порядка: (а) ртутный термометр и (b) RC – цепь.
Находим:
Полагая в обоих случаях RC = τ, мы можем представить эти линейные дифференциальные уравнения первого порядка в следующем общем виде:
где х = х(t), а у = y(t) Таким образом, мы можем придти к выводу, что ртутный термометр и R С- цепь эквивалентны с точки зрения их динамического поведения. Это дифференциальное уравнение решается просто. При скачкообразном входном сигнале
x(t)=x0
при t > О
и x(t)=0 при t <0
а выходной сигнал у(t), или переходную характеристику, находим из
В операторной форме уравнение имеет вид:
![]()
Общее решение
таково: у = С![]() .
.
Частным решением при t → ∞ является функция y(t) = у0 (конечное или установившееся значение):
Полагая, что у(t)= 0 при t = 0, найдем:
Если относительная погрешность измерительной системы не может превосходить e= Δyо /yо, то время установления ts равно
ts = -τ lпе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.