Или
В результате, как и следовало ожидать, мы пришли к линейному дифференциальному уравнению второго порядка.
Чтобы сделать более ясной аналогию с другими системами, указанными на рис. 2.42, перепишем полученное уравнение, введя новую переменную w = dq /dt:
Отклоняющий момент Md является I-величиной (см приложение А 4), а угловая скорость w — V-величиной. Вращающаяся механическая система аналогична системе с поступательным движением, изображенной на рис 2.42(b). Эта последняя состоит из груза массы т, пружины с коэффициентом упругости Kt и демпфера с постоянной затухания Dt Если на систему действует сила Fd то скорость v груза по отношению к земле удовлетворяет равенству
Поскольку v=dx/dt , мы снова приходим к тому же самому линейному дифференциальному уравнению второго порядка, что и полученное ранее. Наконец, обе механические системы — с вращательным и с поступательным движениями — аналогичны электрической системе, показанной на рис. 2.42(с). На этот параллельный электрический контур действует I-величина: по нему течет ток Id Мы хотим определить V-величину, являющуюся решением уравнения:
Это уравнение эквивалентно обоим уравнениям, полученным выше Все различие может состоять в том, что I-величины и V-величины поменяются местами. Структура системы остается одной и той же, когда мы переходим от J к т или С, одновременно заменяя Dr на Dt или 1 / R, а также Кr - на Кt,или 1 / L (см. приложение А. 4). Принимая во внимание, что

последнее уравнение можно переписать в виде:
где I представляет собой ток, текущий по катушке L
Мы видим теперь, что дифференциальное уравнение, описывающее линейную систему второго порядка, в общем случае содержит две постоянные а и b:
Здесь х — это величина входного воздействия х(t), а у — выходная величина у(t), нормализованная по отношению к чувствительности по постоянному току S(0), так что у=y(t)./S(0). Благодаря нормализации третья постоянная в дифференциальном уравнении отсутствует. Чтобы сделать запись более наглядной, введем две другие постоянные: относительное затухание z и угловую частоту w0 свободных незатухающих колебаний в системе, и перепишем общее уравнение с использованием этих констант:
В случае системы с вращением переменные и параметры, входящие в это уравнение, имеют вид:
а в случае системы с поступательным движением —
 |
Для электрической цепи имеем
 |
Соответствующее уравнение в операторной форме выглядит так:
 |
И корни его равны
![]()
Необходимо различать следующие три характерных случая z < 1, z = 1 и z > 1.
Недостаточное демпфирование (z < 1)
Можно показать, что отклик системы y(t) на входной сигнал, имеющий форму скачка величины x0, происходящего в момент t = 0, равен

где ![]() ;при выводе этого
выражения предполагается, что начальные
значения у(0) и (dy/dt)t=o равны нулю. Конечное значение, достигаемое в установившемся режиме,
равно
;при выводе этого
выражения предполагается, что начальные
значения у(0) и (dy/dt)t=o равны нулю. Конечное значение, достигаемое в установившемся режиме,
равно
![]() .
.
Непосредственно вслед за входным скачком возникают затухающие ко лебания с частотой wi, наложенные на конечное значение (см рис. 2 43) Мы видим, что с ростом z затухание колебаний происходит все быстрее Поэтому z называют относительной скоростью затухания.Если z = 0, то колебания в системе продолжаются и их частота равна w0; система находится в режиме свободных колебаний.Таким образом, w0 — это резонансная частота системы, в которой затухание отсутствует полностью
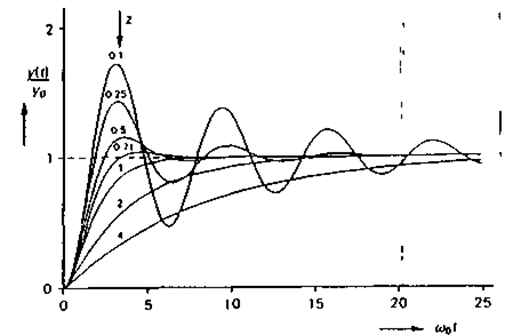
Рис.2.43. Переходные характеристики системы второго порядка при различных значениях относительного коэффициента z.
Критическое демпфирование (z = 1)
Предполагая снова, что начальные условия являются нулевыми, то есть у(0) = 0 и (dy/dt)t=o = 0, а величина скачка на входе в момент t = 0 равна х0, получаем следующее выражение для переходной характеристики системы второго порядка при z=1:
![]()
Как и ранее, конечное значение у0равно х0, но теперь на выходе нет затухающих колебаний (см. рис 2 43).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.