1. Работа программы.
1. Структура программ контроля и управления приведена на рисунке 13.
2. Программы находятся в каталоге MAX82 на диске С. Состав программ в каталоге: max82.exe, max82.dat, egavga.bgi.
3. Начальный запуск (main).
В секции начального запуска осуществляется ввод заданий с жесткого диска (флэш-диска), устанавливаются настройки таймера на плате дискретного ввода-вывода. Адрес платы 200Н, прерывание –10, интервал прерываний –100 мкс. Устанавливаются настройки адаптера аналогового ввода ISO-813.
Запускается сторожевой таймер.
Присваиваются начальные значения управляющим сигналам. По завершению секции начального запуска управление передается диспетчеру программ.
4. Диспетчер программ (main). (“вертушка”).
Работает в замкнутом цикле и проверяет наступление времени выполнения и запускает программы, а также ожидает нажатия клавиши на клавиатуре.
5. Обработка запросов с клавиатуры (newkb). (“по запросу в диспетчере”)
Определяет какая клавиша была нажата и в соответствии с нажатой клавишей выполняет действия: движение курсора, вызов форм, установку ключей, ввод символов, выход из программы.
6. Программа регулирования (krkv). (интервал работы 1 сек)
Программа осуществляет ввод, вывод сигналов и реализацию контуров регулирования по различным законам. На форме F10 осуществляется их настройка.
nKR - номера контуров регулирования;
pvKR – признак типа контура
0 – контур выключен;
1 – ПИД – закон регулирования в приращениях:
Y = Kp*(e-e1)+e/Ki+0.01Kd*(e-2e1+e2),
где – е = ur-v – отклонение от уставки;
v – регулируемая переменная;
ur – уставка регулирования;
е1,е2 – отклонение от уставки на прошлых интервалах;
2 – ПИД – закон, уставка по значению переменной по номеру в nUR;
3 - ПИД – закон, уставка по значению +Y контура номеру в nUR;
4 - ПИД – закон, уставка по значению Y контура по номеру в nUR;
9 – контур регулирования соотношения:
Y = {Kp*(v +Kd)+Ki}*(уставка задания)/100;
где:
nAvt - номер дискретной переменной режима регулирования;
nV - номер регулируемой переменной;
nUR - номер переменной уставки регулирования;
Ki - коэффициент при интегральной части (ПИД закон);
Kd - коэффициент при дифференциальной части;
Kp - коэффициент пропорциональности;
AVT - режим регулирования (1- авт.);
V - величина регулируемой переменной;
Y - величина управляющего воздействия по закону;
nKV - номер канала воздействия;
nKR - номер контура регулирования;
npIM – номер переменной положения исполнительного механизма;
nCAP – номер канала ЦАП;
+IM - верхняя граница положения исполнительного механизма (IM) ;
-IM - нижняя граница IM;
pIM - значение переменной положения исполнительного механизма;
IM - величина управляющего воздействия.
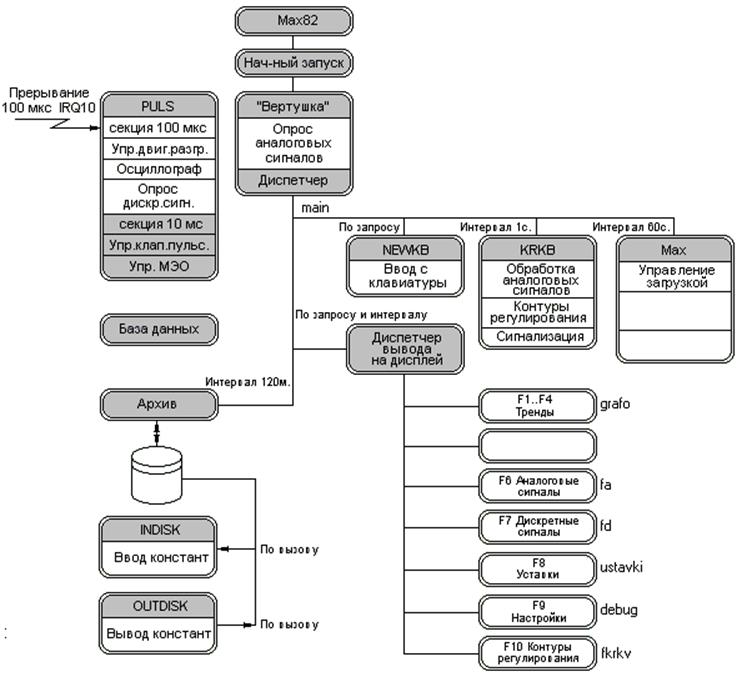
Рис. 13. Структура программ контроля и управления
Аналоговые переменные (ad0) опрашиваются с интервалом 10мс и усредняются на интервале 1сек., затем нормируются по формуле:
an=(ad0-kc)*kb/100.
Опрос осуществляется по каналам, указанным в колонке “вх.” Нормированные значения фильтруются по формуле:
a=a+(an-a)*kf/9999.
Диапазон аналоговых переменных 0-9999. Все коэффициенты задаются на форме F6. Повторное нажатие клавиши отображает имена переменных. Дискретные(d) и аналоговые (а) переменные опрашиваются 1раз в сек. По каналам, указанным в колонке “вх” на формах F6,7. Дискретные управляющие сигналы: номера выходов указываются в колонке “вы” на форме F7. Повторное нажатие клавиши отображает экран формирования трендов. На этой форме можно задавать имена, номера и цвета переменных, отображаемых на формах F1-F4. Частота выдачи сигналов на задвижки – 10 сек.
В программе krkv настроены следующие контура регулирования:
· 0, 1 и 2 – осуществляют…;
7. Программа управления загрузкой (max).
Осуществляет управление загрузкой.
8. Диспетчер вывода форм на дисплей (forma).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.