У D-оптимального плана - минимальный объем эллипсоида рассеивания оценок коэффициентов аi.
9) План X называется G – оптимальным , если достигается наименьшая величина максимальной дисперсии оценки зависимой переменной y в области Ώ.
4.1.Полные факторные планы и их дробные реплики.
В отличие от классического эксперимента, когда факторы меняются по одному, при планировании эксперимента уровни факторов комбинируются, что позволяет уменьшить дисперсию ошибки.
Рассмотрим, например, эксперимент, связанный с определением веса трех предметов (а1,а2,а3), взвешиваемых на пружинных весах с чашей, имеющей собственный вес а0. Тогда классический план взвешивания строится по нижеприведенной схеме, где знак “+” означает наличие груза на весах, а знак “-” отсутствие его на чашке. y – определяет показания весов.
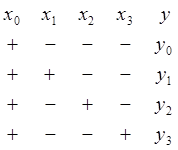
Тогда: 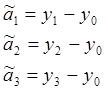
Дисперсия оценки веса при
взвешивании предметов класическим образом равна: ![]() , где
, где ![]() - дисперсия переменной yi.
- дисперсия переменной yi.
При взвешивании путем планирования эксперимента используется матрица
плана Хn , в
соответствие с которой взвешивают одновременно ряд грузов. При таком проведении
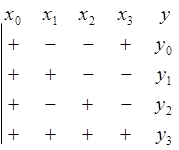
эксперимента оценки ![]() расчитываются с помощью
таблицы:
расчитываются с помощью
таблицы:
 |
|||
 |
Т.е. дисперсия оценки веса предметов при том же числе экспериментов оказалась в два раза меньше.
Обычно планируются эксперименты со следующей регрессионной моделью:

Частный случай представляется линейной
моделью  или неполной квадратичной моделью
или неполной квадратичной моделью 
Факторный план называется полным, если измерения проводятся по одному для каждой возможной комбинации уровней плана.
Если число уровней плана одинаково и равно S, то число измерений равно Sm.
Наиболее часто S = 2 и эти уровни обозначаются “+1” и “-1” или просто “+” и “-“.
4.1.1.Полный факторный эксперимент 22.
При таком плане производится четыре эксперимента. Модель будет выглядеть: ![]()
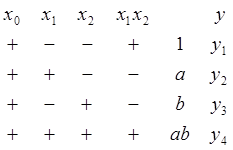 а матрица
плана Х и результаты
эксперимента y:
а матрица
плана Х и результаты
эксперимента y:
![]() код
код
Расчитаем основные характеристики модели при использовании этого плана:
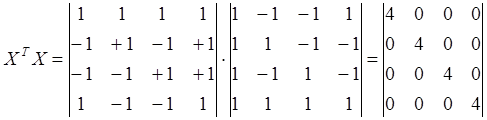 |
Информационная матрица диагональна, следовательно дисперсионная матрица тоже диагональна и имеет вид:
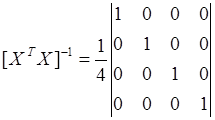 |
Следовательно, рассматриваемый план является одновременно и ортогональным и рототабельным.
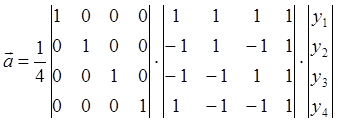
Рассчитаем оценку коэффициентов: ![]()
 |
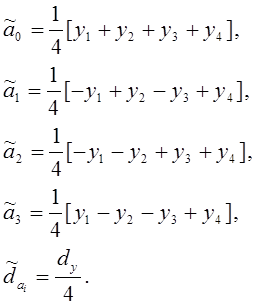 откуда
находим:
откуда
находим:
Область планирования эксперимента представляет собой квадрат (рис.12). Рассматриваемый план является центральным.
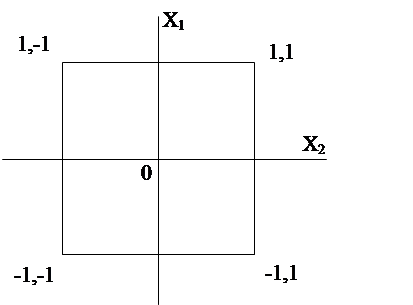 |
рис.12
Область планирования полного факторного эксперимента 22.
4.1.2. Факторный план 23.
Для составления плана введем соответствующие переменные: х0, х1, х2, х3.
Код “a” означает изменение знака переменной х1 (по сравнению с кодом 1). Код “b” означает изменение знака переменной х2 , код ab - изменение знака переменных х1 и х2 .
|
x 0 |
x 1 |
x 2 |
x 3 |
x 1x2 |
x 1x3 |
x 2x3 |
x 1x2x3 |
код |
y |
|
+ |
- |
- |
- |
+ |
+ |
+ |
- |
1 |
y 1 |
|
+ |
+ |
- |
- |
- |
- |
+ |
+ |
a |
y 2 |
|
+ |
- |
+ |
- |
- |
+ |
- |
+ |
b |
y 3 |
|
+ |
+ |
+ |
- |
+ |
- |
- |
- |
ab |
y 4 |
|
+ |
- |
- |
+ |
+ |
- |
- |
+ |
c |
y 5 |
|
+ |
+ |
- |
+ |
- |
+ |
- |
- |
ac |
y 6 |
|
+ |
- |
+ |
+ |
- |
- |
+ |
- |
bc |
y 7 |
|
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
abc |
y 8 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.