Поэтому,если уравнение модели имеет вид: ![]() ei, вектор
ei, вектор ![]() может
принимать значения
может
принимать значения ![]() (-1, 0, 1), тогда
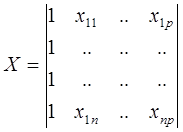
соответствующая матрица плана будет иметь вид:
(-1, 0, 1), тогда
соответствующая матрица плана будет иметь вид:  .
.
3.4.Проверка гипотезы об адекватности регрессионной модели.
Если проверить гипотезу Н0 о том, что рассматриваемая модель адекватна объекту, то для проверки этой гипотезы необходимо сопоставить достигнутую точность модели с величиной, характеризующей точность наблюдений. Если ошибки, характеризующие точность модели, превосходят точность наблюдений, то гипотеза Н0 отклоняется. Поэтому, для проверки адекватности, при проведении экспериментов необходимо в каждой точке проводить несколько экспериментов с одним значением величины i = 1,2,…, n , тогда среднее значение выходной величины

Находим :  ,
,
где ![]() - расчетное значение
- расчетное значение ![]() , а затем вычисляется:
, а затем вычисляется:
Сравнение дисперсий находим по формуле: 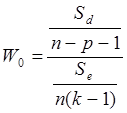
Если W0 < W0,95[n – p - 1, n(k – 1)], то принимается гипотеза Н0. Иначе она отвергается.
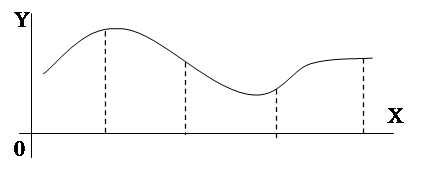
рис.10
Сложная регрессионная зависимость
Если регрессионная зависимость имеет сложный характер, то подобрать подходящий полином практически не удается. Поэтому используется кусочно-параметрическая аппроксимация :
ось Х разбивается на несколько участков, в которых выбираем линейную или квадратичную аппроксимации, наилучшим образом описывающую этот участок. Часто для этих целей используется сплайновая аппроксимация.
4.Планирование эксперимента при регрессион-
ном анализе.
Планирование эксперимента (активный эксперимент) позволяет:
1) повысить точность результата;
2) уменьшить число экспериментов и, следовательно, затраты на их проведение.
Планирование эксперимента используется:
1) для оценивания параметров регрессионных моделей;
2) для анализа нелинейных регрессионных моделей;
3) планирование экстремального эксперимента;
4) планирование эксперимента по проверке гипотез:
а) дискриминирующих экспериментов, позволяющую из ряда моделей выбрать наилучшую;
б) планирование отсеивающих экспериментов для выявления основных факторов, влияющих на результаты эксперимента;
5) планирование имитационного эксперимента, на основании которого можно построить ту или иную математическую модель рассматриваемой системы.
Основные понятия, связанные с планированием эксперимента.
 Если задана матрица плана Х, то
точка
Если задана матрица плана Х, то
точка  называется центром плана (рис.11).
называется центром плана (рис.11).
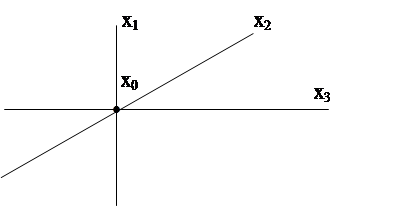
Рис.11
Центр плана эксперимента x0
1) План называется центральным, если x0 = 0;
2) Область возможных значений входных переменных называется областью планирования экспериментов Ώ.
Переменные x i называются варьируемыми переменными или факторами.
Если при планировании эксперимента все ![]() то область планирования называется гиперкубом.
то область планирования называется гиперкубом.
3) Матрица ХТХ называется информационной матрицей плана. Матрица [Х TХ]-1 называется дисперсионной матрицей плана.
4) План Х называется ортогональным, если информационная матрица, а, следовательно, и дисперсионная матрица, являются диагональными.
5) План x называется рототабельным, если оценка дисперсии y в любой точке зависит только от расстояния от центра плана.
Если дисперсионная матрица плана (ХТХ)-1 = а Е, где Е – единичная матрица, то такой план не только ортогонален, но и рототабелен.
6) План Х называется ненасыщенным, если n > p+1, где n – размер матрицы, определяемый числом экспериментов, р + 1 – определяет число переменных xi. Если n = p+1, то план – насыщенный.
7) План X называется А – оптимальным, если дисперсионная матрица имеет минимальный след.
8) План X называется D – оптимальным, если определитель дисперсионной матрицы минимален (или определитель информационной матрицы максимален).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.