постоянная времени Тmax = 0,63 мин;
запаздывание в системе t = 2 мин.;
t* = 10 мин.
Подбор закона регулирования:
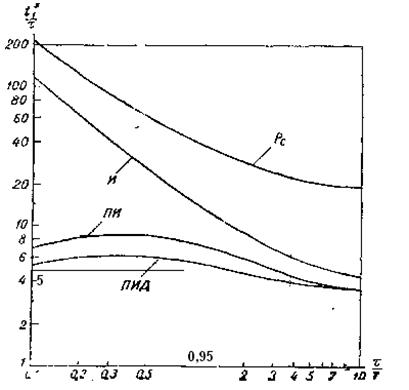 По отношениям t* / τ = 10 / 2 = 5, τ / T = 2 / 0,63 = 3,2 определяем точку:
По отношениям t* / τ = 10 / 2 = 5, τ / T = 2 / 0,63 = 3,2 определяем точку:
Рис.18. Номограмма.
Выбираем ПИ-закон регулирования.
4) Расчет настроечных параметров регулятора
4.1) Табличный способ определения параметров.
4.1.1) В зависимости от параметров объекта, найденных по самому точному методу аппроксимации определить для конкретного закона регулирования его настроечные параметры.
ПИ-закон регулирования:
Кр=![]() , где Коб = 75,
, где Коб = 75, ![]() =2 мин, Т = 0,63 мин;
=2 мин, Т = 0,63 мин;
Кр =  = 0,003;
= 0,003;
Ти = 0,6Т = ![]()
4.1.2) С помощью программы АСОТАР строим переходную характеристику системы для этого, выбрав в меню ПИД-контур регулирования, ручная настройка подставляем численные значения коэффициентов закона регулирования, найденные по табличному способу.
Кр = 0,003, Ти = 0,378 мин.

![]()
4.1.3) Определение параметров качества регулирования.
а) Найти интегральную оценку качества
I=
I = ∫ | h(t)-hуст
| dt = ![]() | h(i∙∆t)- hуст
| ∙∆t =
2675,2·0,1=267,5
| h(i∙∆t)- hуст
| ∙∆t =
2675,2·0,1=267,5
б) Время переходного процесса характеризует быстродействие
системы и определяется как интервал времени от начала переходного
процесса до момента когда отклонение выходной величины от ее
установившегося значения становится меньше 5%.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.20. Переходная характеристика.
Рис.20. Переходная характеристика замкнутой системы.
tр = 8,6 мин.
в) Перерегулирование системы.
Перерегулирование системы ![]() – максимальное отклонение в
– максимальное отклонение в
переходный период.
 ;
;
![]()
т.к. переходной процесс апериодический, то такие показатели
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.