Выбираем максимальную ошибку апроксимации ![]()
Вывод: в инженерных расчетах допускается ошибка аппроксимации ∆<5% , а т.к. максимальная ошибка аппроксимации не превосходит 5% (∆max=4,66667%), отсюда следует, что данный метод подходит для экспериментальной переходной характеристики.
3) Выбор регулятора
3.1) Выбор типа регулятора.
Ориентировочно характер действия регулятора определяют по величине
соотношения ![]()
Если ![]() < 0,2 –
позиционный регулятор;
< 0,2 –
позиционный регулятор;
Если 0,2 < ![]() <
1 – регулятор непрерывного действия;
<
1 – регулятор непрерывного действия;
Если ![]() > 1 –
многоконтурная система управления;
> 1 –
многоконтурная система управления;
Под выбором типа регулятора подразумевается выбор простейшего закона
регулирования наиболее дешевого и простого в эксплуатации регулятора,
обеспечивающего при различных возмущениях в заданных пределах
динамическую ошибку, время регулирования и статическую ошибку. Поэтому в соответствии с требованиями технологии в качестве заданного выбирают один из типовых переходных процессов:
1 тип: Граничный апериодический (без перерегулирования).
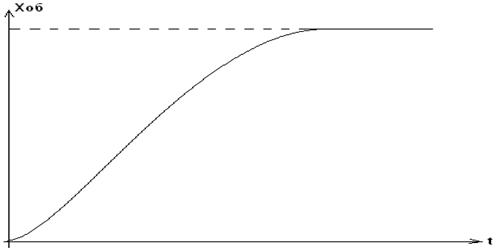
Рис. 11.
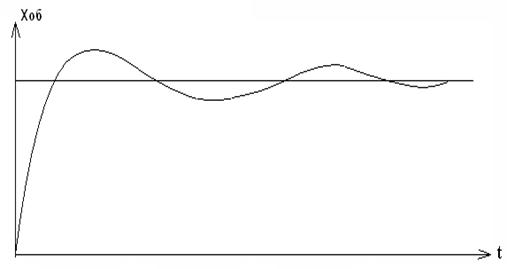
2 тип: с 20% перерегулированием.
3 тип: с минимальной квадратичной площадью отклонения (40-45%
перерегулирование).
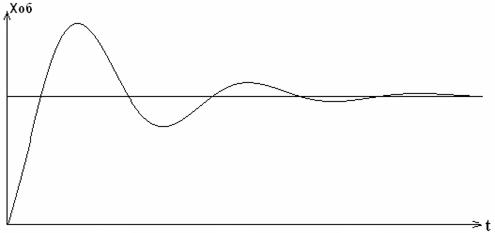
Рис.12.
В нашем случае время запаздывания ![]() = 2 мин, Тmax =2,1 мин, следовательно
= 2 мин, Тmax =2,1 мин, следовательно
![]() =2 / 2,1 = 0,95 –
регулятор непрерывного действия.
=2 / 2,1 = 0,95 –
регулятор непрерывного действия.
Выбираем 1 тип переходного процесса, т.е. граничный апериодический (без перерегулирования).
Рис.13.
3.2) Выбор закона регулирования по номограммам.
А) если переходный процесс без перерегулирования
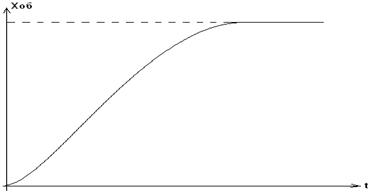
Рис.14.
тогда используем следующую номограмму:
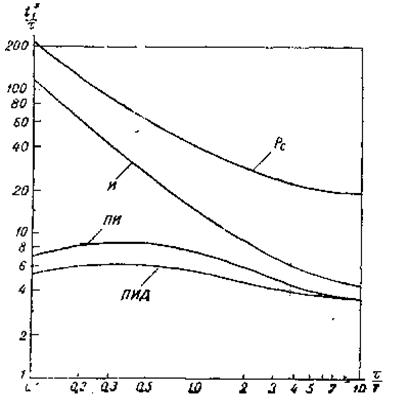
.
Рис.15. Номограмма.
t* - время в течение которого желательно окончание переходного процесса
Т – постоянная времени из наиболее точного метода аппроксимации
![]() - время
запаздывания.
- время
запаздывания.
Б) если переходной процесс с перерегулированием
Рис.16.
то используем следующую номограмму:
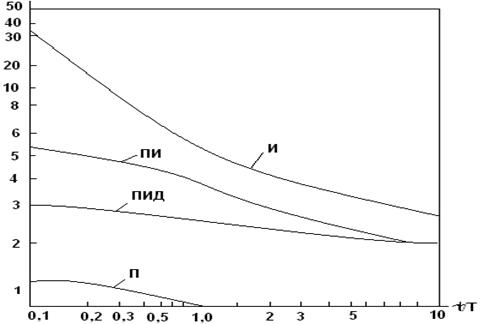
Рис.17. Номограмма.
Для автоматизации системы регулирования температуры воды в деаэраторе ДСА-300 необходимо выбрать автоматический регулятор, чтобы переходной процесс был граничным апериодическим, если данный объект регулирования характеризуется следующими динамическими свойствами:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.