Линейное программирование применяется для решения линейной оптимизационной задачи, поэтому вначале составляется модель линейной оптимизационной задачи в следующей последовательности:
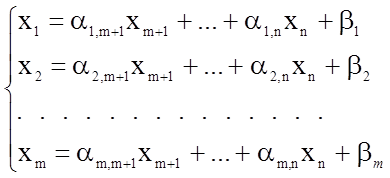
1) записывается вектор X представляющий собой множество линейно зависимых переменных (параметров)
![]() ;
;
2) составляется целевая функция (критерий эффективности) в виде
![]() ;
;
3) записывается система линейных алгебраических неравенств в виде
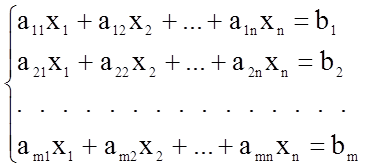
![]() .
.
В системе ![]() представляет
собой ресурсы,
представляет
собой ресурсы, ![]() - расход j-ых
ресурсов на i-ый параметр. Если в системе есть неравенства, то
необходимо перейти к равенствам путем введения дополнительных переменных
- расход j-ых
ресурсов на i-ый параметр. Если в системе есть неравенства, то
необходимо перейти к равенствам путем введения дополнительных переменных ![]() Из системы видно, что число
уравнений m всегда меньше числа переменных n.
Из системы видно, что число
уравнений m всегда меньше числа переменных n.
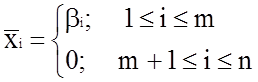
Целью моделирования является поиск таких значений ![]() , при которых целевая функция
, при которых целевая функция ![]() достигает своего минимума. Если
первоначально целевая функция записана под поиск максимума, то необходимо
знаки ее переменных сменить на обратные, т.е. записать в виде Ф(-Х).
достигает своего минимума. Если
первоначально целевая функция записана под поиск максимума, то необходимо
знаки ее переменных сменить на обратные, т.е. записать в виде Ф(-Х).
Цех выпускает валы и втулки. На производство 1 вала рабочий тратит 3 часа, а на производство 1 втулки - 2 часа. От реализации вала предприятие получает прибыль 800 руб., от реализации втулки - 600 руб. Цех должен выпустить не менее 100 валов и не менее 200 втулок. Сколько валов и втулок должен выпустить цех, чтобы получить наибольшую прибыль, если фонд рабочего времени составляет 900 человек - часов?
В качестве переменных (параметров) выбираем: ![]() - число валов,
- число валов, ![]() - число втулок. Затраты на выпуск 1
вала обозначим
- число втулок. Затраты на выпуск 1
вала обозначим ![]() =3 час/вал, на выпуск 1
втулки -
=3 час/вал, на выпуск 1
втулки - ![]() =2 час/втулка. Прибыль от реализации
1 вала
=2 час/втулка. Прибыль от реализации
1 вала ![]() =800 руб./вал, от
реализации 1 втулки -
=800 руб./вал, от
реализации 1 втулки - ![]() =600 руб./втулка. Ресурсы
рабочего времени
=600 руб./втулка. Ресурсы
рабочего времени ![]() =900 человек - часов.
Условия по выпуску валов и втулок:
=900 человек - часов.
Условия по выпуску валов и втулок: ![]() ,
, ![]() .
.
Таким образом, модель запишется в виде:
- множество параметров ![]() ;
;
- ограничения 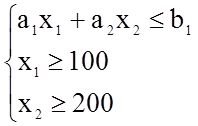 ;
;
- целевая функция 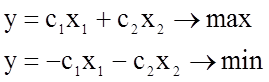 .
.
Далее систему неравенств сведем
к системе равенств: 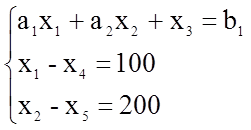
Симплекс-метод решения задач
линейного программирования
Как правило, в линейной задаче число уравнений меньше числа неизвестных. Следовательно, однозначно можно определить число неизвестных, равное числу уравнений. Остальные неизвестные определить нельзя, поэтому их при решении линейных задач принимают за свободные переменные и приравнивают их к нулю.
Решение линейной задачи симплекс-методом ведется в следующей последовательности:
1. Из вектора переменных размерностью n выбирают переменные, число которых равное числу уравнений ограничений m, их принимают за однозначно определенные (базовые) переменные. Остальные (n-m) переменных принимают за свободные и приравнивают их к нулю.
2. Базовые переменные, исходя из уравнений ограничений, выражают через свободные переменные в виде линейной комбинации
![]()
После преобразования оставляется каноническая форма записи модели. Эту запись иногда называют симплекс-планом или опорным планом. Модель записывается в виде следующей системы уравнений:
![]()
Для того чтобы проверить отвечает ли составленная система поставленной цели, необходимо полученные значения базисных переменных подставить в целевую функцию:
![]() ,
,
где
![]() - значение целевой функции,
определяемое
- значение целевой функции,
определяемое ![]() и проанализировать полученную
целевую функцию. Если в целевой функции все коэффициенты
и проанализировать полученную
целевую функцию. Если в целевой функции все коэффициенты ![]() , то опорный план оптимальный.
Следовательно,
, то опорный план оптимальный.
Следовательно,
Если в целевой функции некоторые коэффициенты ![]() <0, то план не оптимален.
Необходимо строить новый план. Для этого по симплекс-методу одну из свободных
переменных (у которой
<0, то план не оптимален.
Необходимо строить новый план. Для этого по симплекс-методу одну из свободных
переменных (у которой ![]() ) необходимо перевести в
разряд базисных, а одну из базисных переменных перевести в разряд свободных и
составить новый опорный план. Далее процедуру повторяют. Смену переменных
выполняют следующим образом. В разряд базисных переводят ту свободную
переменную, у которой больше абсолютное значение коэффициента. Затем в выше
рассмотренном опорном плане проверяется, какая из базисных переменных при
увеличении выбранной свободной переменной быстрее устремляется к нулю. Эту
переменную переводят в разряд свободных.
) необходимо перевести в
разряд базисных, а одну из базисных переменных перевести в разряд свободных и
составить новый опорный план. Далее процедуру повторяют. Смену переменных
выполняют следующим образом. В разряд базисных переводят ту свободную
переменную, у которой больше абсолютное значение коэффициента. Затем в выше
рассмотренном опорном плане проверяется, какая из базисных переменных при
увеличении выбранной свободной переменной быстрее устремляется к нулю. Эту
переменную переводят в разряд свободных.
Для задачи, рассмотренной выше, запишем модель в виде:
- целевая функция (критерий эффективности)
![]() ;
;
- ограничения (область определения)
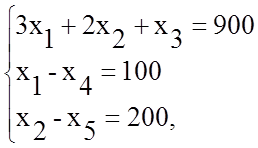
где ![]() - неиспользуемый
ресурс времени,
- неиспользуемый
ресурс времени, ![]() - дополнительно выпускаемые
валы,
- дополнительно выпускаемые
валы, ![]() - дополнительно выпускаемые втулки
- дополнительно выпускаемые втулки
Согласно модели в системе число неизвестных n=5, число уравнений m=3. Решаем задачу симплекс-методом.
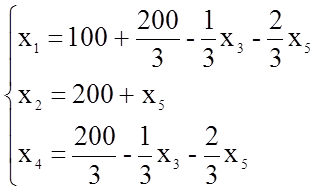
1. Переменные х4, х5 считаем свободными. В качестве базисных
переменных, выраженных через свободные, возьмем х1, х2, х3. Составим опорный план:
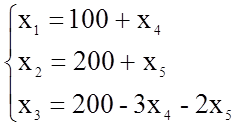

Коэффициенты при х4, х5 отрицательные, следовательно, опорный план не оптимален. Переходим к построению нового опорного плана.
2. Из целевой функции видно, что в разряд базисных целесообразно перевести переменную х4, а х5 оставить свободной. Из числа базисных переменных в разряд свободных целесообразно перевести х3. Тогда новый опорный план будет иметь вид:

Из целевой функции видно, что коэффициент при х5 отрицательный, т.е. план не оптимален. Переходим к составлению нового опорного плана.
3. Из разряда свободных переменных х5 переводим в базисные, а из базисных переменных х4 переводим в свободные. Составим опорный план вида:
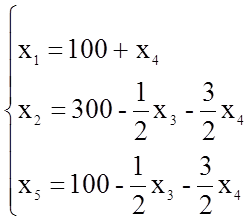

Из целевой функции видно, что опорный план оптимальный. Следовательно х1=100, х2=300, х3=0, х4=0, х5=100 и в соответствии с поставленной задачей необходимо выпустить 100 шт. валов и 300 шт. втулок. При этом будут использованы все ресурсы, и прибыль составит 260 тысяч рублей.
Динамическое программирование
Существуют системы, которые под воздействием
управления могут, изменяясь по шагам, переходить из начального состояния ![]() в конечное состояние
в конечное состояние ![]() . Такая система описывается
множеством состояний
. Такая система описывается
множеством состояний ![]() . В свою очередь каждое
состояние
. В свою очередь каждое
состояние ![]() представляет собой
представляет собой ![]() -мерное подпространство
-мерное подпространство ![]() . Система из состояния
. Система из состояния ![]() переходит в следующее или конечное
состояние под воздействием управления U, которое представляет собой
множество
переходит в следующее или конечное
состояние под воздействием управления U, которое представляет собой
множество ![]() . При этом каждое управление
. При этом каждое управление ![]() представляет собой
представляет собой ![]() -мерное подпространство
-мерное подпространство ![]() . В такой системе необходимо выбрать
множество управления U таким, чтобы оно с максимальной эффективностью
переводило систему из начального состояния S0 в конечное состояние Sn.
. В такой системе необходимо выбрать
множество управления U таким, чтобы оно с максимальной эффективностью
переводило систему из начального состояния S0 в конечное состояние Sn.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.