























































Теория автоматизированного управления.
Конспект лекций.
Содержание:
12.02.99
Для описания системы управления применяются следующие виды описаний:
1. дифференциальные и алгебраические уравнения
2. матричные уравнения
3. структурные схемы
Существует взаимно-однозначная связь между этими видами описания системы управления.
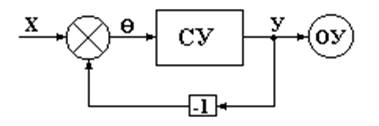 |
Х – входное управляющее воздействие
![]() - сумматор сигналов управляющего и обратной связи
- сумматор сигналов управляющего и обратной связи
θ - рассогласование между управляющим сигналом Х и входным сигналом У
СУ – система управления, которая преобразует входной сигнал в выходной
У – выходной сигнал системы управления
ОУ – объект управления, обладающий массой, инерционностью
-1 – отрицательная обратная связь системы управления, которая инвертирует знак выходного сигнала
![]()
![]()
![]()
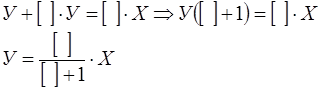
![]() Изучение
теории управления сводится к изучению передаточной функции системы управления,
представленной в одном из возможных видов:
Изучение
теории управления сводится к изучению передаточной функции системы управления,
представленной в одном из возможных видов:
1. дифференциальные и алгебраические уравнения
2. математическая алгебра
3. отрицательное исчисление
4. теория вероятности и математическая статистика
Для управления объектом, имеющим массу, необходимы исполнительные элементы, преобразующие сигналы управления в механическое движение, линейное или вращательное. В качестве исполнительного элемента – двигатель постоянного тока, используются также двигатели переменного тока, гидравлические исполнительные элементы, шаговые двигатели, пневматические исполнительные элементы.
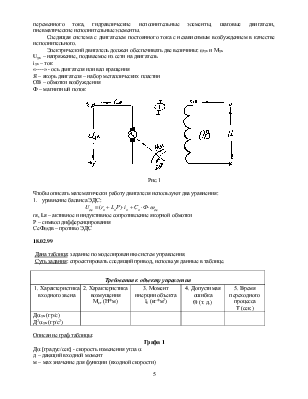
Следящая система с двигателем постоянного тока с независимым возбуждением в качестве исполнительного.
Электрический двигатель должен обеспечивать две величины: ωдв и Мдв.
Uдв – напряжение, подаваемое из сети на двигатель
iдв – ток
«----» - ось двигателя или вал вращения
Я – якорь двигателя – набор металлических пластин
ОВ – обмотки возбуждения
Ф – магнитный поток
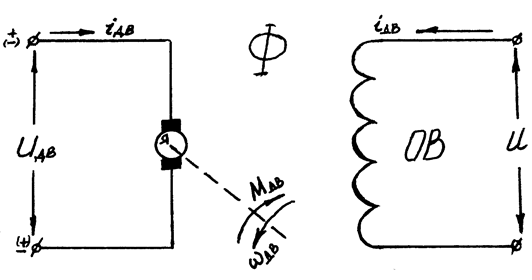
Рис.1
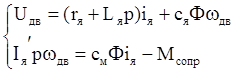
Чтобы описать математически работу двигателя используют два уравнения:
1. уравнение баланса ЭДС:
![]()
rя, Lя – активное и индуктивное сопротивление якорной обмотки
Р – символ дифференцирования
СеФωдв – противо ЭДС
18.02.99
Дана таблица: задание по моделированию систем управления.
Суть задания: спроектировать следящий привод, используя данные в таблице.
Требования к объекту управления |
||||
|
1. Характеристика входного звена |
2. Характеристика возмущения Мст (Н*м) |
3. Момент инерции объекта I0 (кг*м2) |
4. Допустимая ошибка Q (т. д.) |
5. Время переходного процесса Т (сек.) |
|
Дaдм (гр/с) Д2aдм (гр/с2) |
||||
Описание граф таблицы:
Графа 1
Дa [градус/сек] - скорость изменения угла a д – дающий входной момент м – мах значение для функции (входной скорости)
![]() -
оператор дифференцирования
-
оператор дифференцирования
Д2aдм (гр/с2) - мах значение ускорения(вращательного движения) на входе нашего устройства
Мст (Н/м) – момент статического сопротивления, приложенного к объекту.
Момент =сила*плечо
Статический момент является моментом нагрузки (сопротивления) и всегда действует в сторону против движения.
Графа 3
I0 (кг*м2) – момент инерции объекта (момент инерции тела вращения)
Q (т. д. или т. у.) – тысячная дистанция – угол соответствующий отношению высоты “ ” к длине.
Графа 5
Т или tп – время переходного процесса
6000 т. д.=6000д. у.=3600 =2p рад = 1 оборот
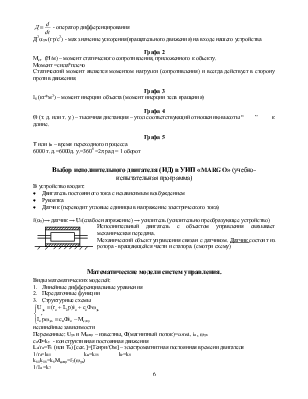
В устройство входят:
· Двигатель постоянного тока с независимым возбуждением
· Рукоятка
· Датчик (переводит угловые единицы в напряжение электрического тока)
f(αд)→ датчик → U1(слабое напряжение) → усилитель (усилительно преобразующее устройство)
 Исполнительный двигатель с объектом управления связывает
механическая передача.
Исполнительный двигатель с объектом управления связывает
механическая передача.
Механический объект управления связан с датчиком. Датчик состоит из ротора - вращающейся части и статора. (смотри схему)
Виды математических моделей:
1. Линейные дифференциальные уравнения
2. Передаточные функции
3. Структурные схемы
нелинейные зависимости
Переменные: Uдв и Мсопр – известны, Ф(магнитный поток)=const, iя , ωдв
сяФ=kе - конструктивная постоянная движения
Lя/rя=Т6 (или Тя) [сек.]=[Генри/Ом] – электромагнитная постоянная времени двигателя
1/rя=k61 kn=k16 ke=k8
k61k16=k6Mсопр=f7(ωдв)
1/Iя’=k7
e1=keωдв e2=Uдве , где е - электродвижущая сила (ЭДС)
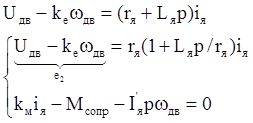
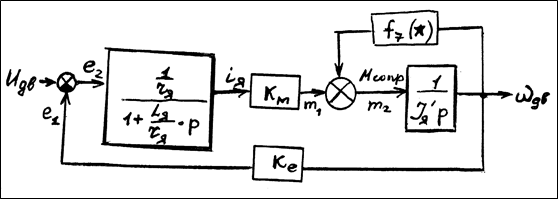
Рис. 1
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.