К – коэффициент, используемый для определения добротности по скорости нашей системы.
Для нахождения К4 ЖЛАХ опускаем на –20дб/дек. (до –60дб/дек), следовательно, ЖЛАХ параллельна наклону ЛАХ после частоты ωс2. Это приводит к тому, что расстояние a увеличится. Только после этого надо вычитать ЛАХ из ЖЛАХ, чтобы получить ЛАХ звена последовательной коррекции (ЛАХпк), при этом пренебрегаем одним коэффициентом – 1/Тс2.
Если Тс1 или Тс2 зайдет в область низкочастотную, то такая система является крайне неустойчивой. ЛАХ пересечет ωм под наклоном –60дб/дек., а величина а будет очень большой, от нее зависит коэффициент усиления (К4).

Рис. 3
Для регулировки такой системы вводят сигнал:
Ктг*рΘ
Ктг*рΘ=Ктг*р(αо-αд)
В системе MARGO: Ктг=К10=К13 – условие, позволяющее ввести первую производную от угла рассогласования.
Когда Ктг*рΘ=0, значение частоты в точке А=Ктг (см. рис.3). Достаточно положить:
К10=К13=1/Тс1,
Что приведет к коррекции ЛАХ (скорректированная ЛАХ заштрихована – см. рис.3), т.е. на частоте 1/Тс1 кривая изменит наклон до –20дц/дек.
Что мы изучаем?
Рассмотрение общих законов и общих методов теории управления сводится к изучению общих математических моделей, которые могут быть разного уровня приближения: от простых до самых сложных.
Структурные схемы.
Со структурных схем мы начинаем изучение линейного приближения динамической системы управления (ДСУ). Общий вид математической модели:
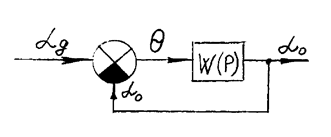
Рис. 4
Эта модель реализуется графоаналитическим способом.
W(P) – передаточная функция ДСУ в разомкнутом состоянии
Ф(Р) – передаточная функция замкнутой ДСУ
ФΘ(Р) – передаточная функция замкнутой ДСУ по ошибке
![]()
![]()
![]()
Все эти функции связаны между собой однозначным взаимным преобразованием, которое осуществляется через уравнение ошибки:
![]() , следовательно,
, следовательно,
![]() …(1)
…(1)
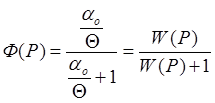
Подставляя (1) в Ф(Р), получим:
![]() , разделим почленно на Θ:
, разделим почленно на Θ:
Если подставить (1) в уравнение ФΘ(Р), то получим:
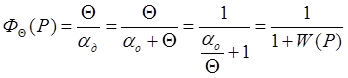 .
.
Если в передаточной функции оператор «Р» заменить на (jω), то получим частотную характеристику :
- разомкнутой ДСУ – W(jω)
- замкнутой ДСУ – Ф(jω)
- замкнутой ДСУ по ошибке – ФΘ(jω)
Такой переход удобен, т.к. эти передаточные функции можно представить в комплексной плоскости:
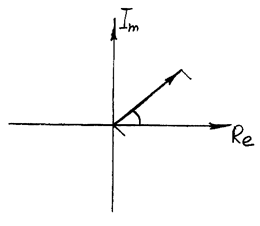
Рис. 5
![]() -
отношение двух сигналов от одной частоты
-
отношение двух сигналов от одной частоты
Разделим Ф(jω) на вещественную и мнимую часть, где:
Ф(jω)=А(ω)+j·В(ω)
А(ω)=Re(Ф(jω)) – вещественная часть – вещественная амплитудная частотная характеристика
В(ω)=Im(Ф(jω)) – мнимая часть
Если построить А(ω) при изменении ω от 0 до ∞, то она будет иметь такой вид:
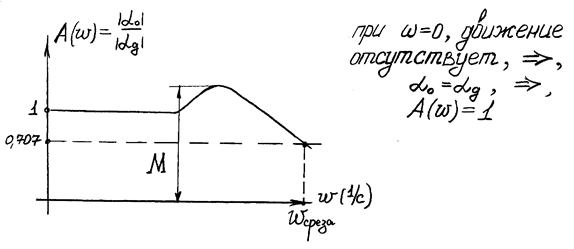
ωс – ωсреза, определяет полосу пропускания частот ДСУ
Частота определяется значением, обратным периоду:
![]()
М – показатель колебательности, определяет колебательные свойства ДСУ. Чем больше М, тем более колебательная система, и наоборот.
Только когда система устойчива, можно говорить о показателе колебательности. Чем менее инерционна система, тем М больше.
Использование передаточных функций и частотных характеристик удобно, так как с их помощью можно косвенно оценивать устойчивость и точность ДСУ.
Запас устойчивости – та зона изменения параметров системы, которая способствует улучшению показателей точности при сохранении устойчивости.
Если найдено прямое решение математической модели ДСУ, то оно может быть представлено графически и аналитически.
В MARGO аналитическое решение математической модели:
![]()
Х[1]=…
X[2]=…
Это аналитическая форма записи полного движения системы. Это решение представляет собой сумму взвешенных экспонент:
![]() ,
i = 1…I
,
i = 1…I
λi – корни характеристического уравнения
Сi – взвешенность, определяется постоянной интегрирования, которая определяется из начальных условий.
В MARGO только одно решение – Х6 – отлично от нуля и соответствует единичному входному воздействию, все остальные равны нулю.
01.04.99
![]()
Характеристический полином
![]()
Характеристическое уравнение
p=d/dt
![]() -
дробно-рациональная функция заменим р на jω, где j=√-1 –
мнимая единица приведём дробь к след. виду
-
дробно-рациональная функция заменим р на jω, где j=√-1 –
мнимая единица приведём дробь к след. виду![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.