![]() -
вектор-столбец.
-
вектор-столбец.
2. Показатели надёжности. Мы будем рассматривать те показатели надёжности, которые отвечают за выполнение системой, предписанной ей целевой функции.
В.Б.Р. – вероятность безотказной работы. Обозначается:
![]() -
интенсивность отказа схемы конструктивной реализации.
-
интенсивность отказа схемы конструктивной реализации.
 -
вероятный отказ схемы конструктивной реализации.
-
вероятный отказ схемы конструктивной реализации.
3. Обобщённые показатели качества. К ним мы отнесём все прочие показатели качества (масса, габариты, стоимость)
Все три группы показателей взаимно противоречивы и практически независимы друг от друга.
Для повышения надёжности наиболее эффективным является включение резервных каналов управления. В том случае, если конструктивно основной и резервный каналы совпадают, то такой резервный канал называется дублирующим и должен рассматриваться как предельный случай резервного. Включение резервного канала повышает надёжность при сохранении качества функционирования, но вступает в противоречие с обобщёнными показателями, то есть возрастают масса, габариты, стоимость.
Вернёмся к первым двум группам показателей. Введём для группы показателей функционирования следующее обозначение:
 -
вероятный отказ функционирования.
-
вероятный отказ функционирования.

Эта операция называется
строгое согласование вероятностных мер взаимнопротиворечивых случайных оценок
(событий). Это выражение будем называть вероятностью безотказного
(безопасного) управления или безотказность (безопасность) управления. В
безопасном управлении присутствует ![]() ,
в безопасном -
,
в безопасном - ![]() .
.
 - для безотказности управления.
- для безотказности управления.
 - для безопасности управления.
- для безопасности управления.
Таким образом для оценки показателей функционирования надо знать три их значения:
1. ![]() -
заданное. Может быть:
-
заданное. Может быть:
a) ![]() -
граничное;
-
граничное;
b) ![]() -
предельное.
-
предельное.
2. ![]() -
математическое ожидание.
-
математическое ожидание.
3. ![]() -
дисперсия.
-
дисперсия.
Для того, чтобы из уравнения математической модели ДСУ
![]() , x(t0)=x0
, x(t0)=x0
получить ![]() и
и
![]() необходимо
проинтегрировать, решить его относительно математического ожидания и дисперсии
и выбрать из решения те значения переменных, которые относятся к показателям Jm.
Осуществляется операция выбора с помощью матрицы наблюдателя C уравнения Y=CX.
необходимо
проинтегрировать, решить его относительно математического ожидания и дисперсии
и выбрать из решения те значения переменных, которые относятся к показателям Jm.
Осуществляется операция выбора с помощью матрицы наблюдателя C уравнения Y=CX.
Отсюда вывод: для этого нам необходимо осуществить операцию осреднения этой математической модели. Эта задача распадается на две:
1. решение уравнения свободного движения
Dx=A(m)x, x(t0)=x0
Хотя бы одна координата x0 ![]() 0.
0.
Dx=mx, x(t0)=1
x – переменная, m - случайная величина.
![]() =>
=> ![]()
 -второй
начальный момент случайной величины m.
-второй
начальный момент случайной величины m.
Форма решения этого ДУ:
![]()
![]() ,
,
![]()
![]() - постоянная величина.
- постоянная величина.
Подставим ![]()

![]()
 Для
того чтобы развернуть осреднение, надо найти
Для
того чтобы развернуть осреднение, надо найти ![]() .
.
 -
производная экспоненциальная функция.
-
производная экспоненциальная функция.
 -
ряд Чебышева-Эрмита.
-
ряд Чебышева-Эрмита.
![]() -
целая часть от полученного числа.
-
целая часть от полученного числа.
Пусть: ![]() ,
,
![]() - среднеквадратичное отклонение.
- среднеквадратичное отклонение.

Умножив правую и левую части на  ,
получим:
,
получим:

23.04.99
Р в первой степени говорит о том, что система имеет
астатизм первого порядка, что означает, что: ![]() ,
- статическая ошибка, а
,
- статическая ошибка, а ![]() -
скоростная оценка.
-
скоростная оценка.
Статическая ошибка определяется при постоянном входном
воздействии![]() .
.
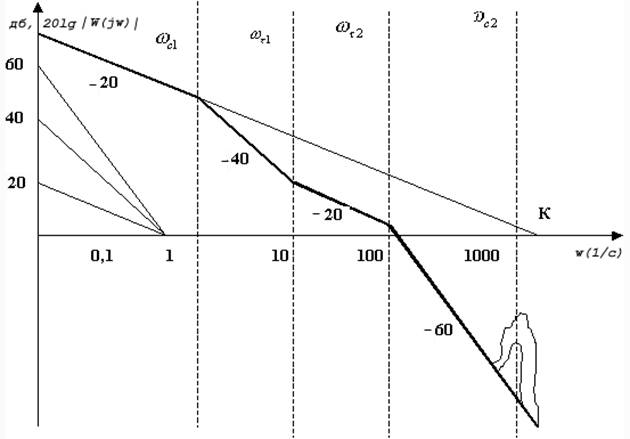
Рис. 1
В поле допуска все параметры имеют свойство случайности:
![]() μ
– вектор случайных параметров
μ
– вектор случайных параметров ![]()
N зависит от степени приближения математической модели к реальности.
Цель: можно
ли с помощью стационарного (коэффициенты не зависят от времени) стахостического
уравнения ![]() решить
задачу оценки качества функционирования нашей системы.
решить
задачу оценки качества функционирования нашей системы.
Качество функционирования зависит от двух видов случайности:
1) Случайные параметры оператора движения (свободного) А(μ).
2) Возможные
случайные составляющие u: ![]() ,
,
где ![]() -
регулярная составляющая внешних воздействий ( может быть описана конкретной
функцией),
-
регулярная составляющая внешних воздействий ( может быть описана конкретной
функцией),
![]() -
случайная составляющая.
-
случайная составляющая.
Переходим к виду:
1)
![]()
Для решения такого уравнения, надо решить задачу свободного движения. Начальные параметры ненулевые.
а) Осредняем это уравнение:
1.
![]()
Неравенство Чебышева-Ку……..
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.