Поэтому такое звено называют интегродифференцирующим звеном последовательной коррекции.
На первом этапе к4=1, далее будем рассчитывать
Это пассивное звено, всегда уменьшает сигнал
К5 – коэффициент усиления выходного каскада берем к5=1
к3*к4*к5 – коэффициент усиления усилителя
Uдв =(rя +Lя p)iя +kl*wдв (*) – уравнение двигателя
Uдв =U1*к3*к4*к5
К6=км/rя (берем из части (*)) Uдв=rя*iя
К7 – величина, обратная приведенному моменту инерции двигателя Io’, Io’=Iдв+Io/ip, ip=1/k9
F7 – коэффициент естественной (конструктивной) отрицательной обратной связи по скорости. Определяется из противо-ЭДС двигателя.
Противо-ЭДС – это величина кl*wдв на эту величину ниже поданное Uдв. Чем быстрее вращается якорь, тем меньше Uдв.
Уравнение моментов, то что вырабатывает двигатель в качестве момента, который уходит на движение и преодоление сил трения
Мэд=км*iя
Io’разв= км*iя-Мсопр - второе уравнение движения
Если (км*iя-Мсопр)<>0, то появляется ускорение р*wдв
К9 – коэффициент механической передачи к9= Дaдм*1,2/wн= Дaдм /wо
К10 – отрицательная обратная связь по скорости
К11 – отрицательная обратная связь по ускорению
К10 и К11 реализуют введение в закон управления первой и второй производных от угла поворота исполнительной оси
К12 и К13 – коэффициенты компенсирующих сигналов по первой и второй производным.
К14 – коэффициент единичной главной обратной связи. В схеме MARGO используется только для размыкания системы.
Wp=(k/(Tp+1))/(1+k/(Tp+1))
Рис.12
04.03.99
Движение характеризуется суммарным моментом на объекте.
Jя – момент инерции (кг·м2)
iя – ток (А)
![]()
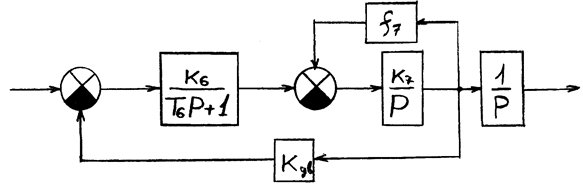
Рис 1
В этой схеме f7 очень мало.
f7 – определяет эквивалентный синусный режим.
![]()
Пренебрегаем f7 – (трением).

Рис 2
Если найти передаточную функцию для этой системы:
Чем больше Uдв, тем больше Mэм.
Mэм – электромагнитный момент.
Механическая передача – редуктор. С помощью него двигатель воздействует на объект.

Рис 3
Mдв, пройдя через механическую передачу, увеличивается в ip раз, следовательно wн уменьшается.
ip – передаточное отношение редуктора.
Мощность=Момент·Скорость
![]() - второй закон Ньютона для вращательного движения.
- второй закон Ньютона для вращательного движения.
![]()
![]()
«1,2» – 20% запас.
Передаточное отношение редуктора – это отношение скорости двигателя к скорости объекта.
Закон Ома:
![]()
Чем больше ![]() ,
тем больше
,
тем больше ![]() .
Если увеличить
.
Если увеличить ![]() ,
то во столько же раз увеличится
,
то во столько же раз увеличится ![]() .
.
![]()
![]() -
тепло, если
-
тепло, если ![]() возрастает,
то нагрев двигателя увеличится в
возрастает,
то нагрев двигателя увеличится в ![]() раз.
раз.
Так как ![]() и
и
![]() постоянны,
то производная по скорости равна нулю. Следовательно:
постоянны,
то производная по скорости равна нулю. Следовательно:
![]()
В первом приближении пренебрежём ![]() . Фрагмент схемы MARGO выглядит так:
. Фрагмент схемы MARGO выглядит так:
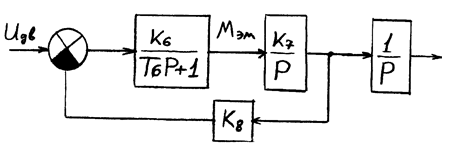
Рис 4
Соберём передаточную функцию (вместо двух схем внутри возьмём их произведение).
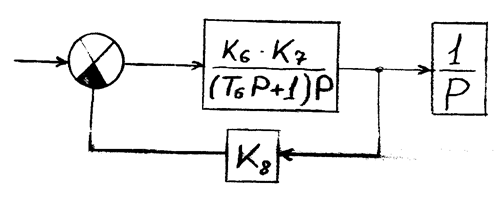
Рис 5
Следующее преобразование:
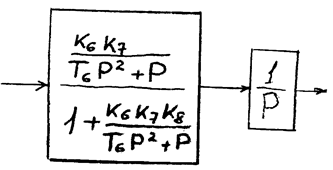
Рис 6
P – оператор, связывает входящую функцию с выходящей.
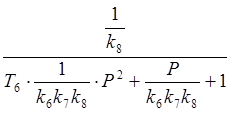
Приводим к общему знаменателю:
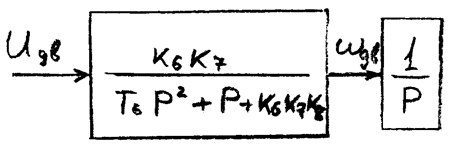
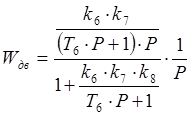
Рис 7
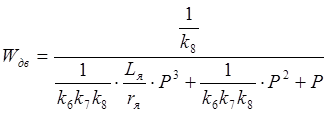
Окончательное: (делим)
(*)![]() -
передаточное отношение двигателя.
-
передаточное отношение двигателя.
1. ![]()
2. ![]()
3. ![]()
В программе MARGO при k14=0 передаточное отношение всей системы:
(**)![]()
![]()
Отличие (*) от (**):
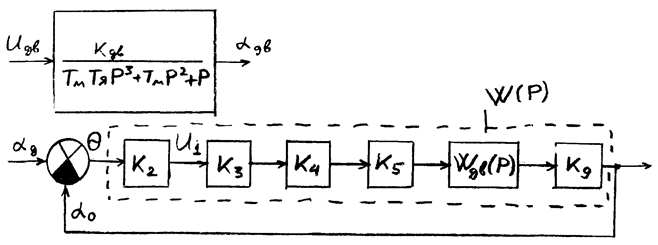
Рис 8
![]() преобразует
угол q в U1.
преобразует
угол q в U1.
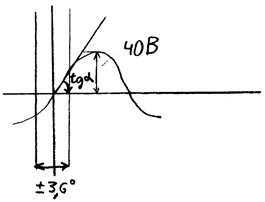
Рис 9
Задача: выбрать k3:
![]() -
передаточная функция в разомкнутом состоянии.
-
передаточная функция в разомкнутом состоянии.
![]() -
передаточная функция в замкнутом состоянии по ошибке.
-
передаточная функция в замкнутом состоянии по ошибке.
![]()
![]() -
условие Раута-Гурвица.
-
условие Раута-Гурвица.
05.03.99
В теории автоматического управления используются три группы обозначений:
1. Переменные:
u – напряжение электрического тока [В или мВ];
uдв или uя – напряжение, поданное на якорь двигателя;
i – электрический ток, iя– ток в якоре, но iр – передаточное отношение редуктора (к9=1/iр);
М – момент, Мст – статический момент, не изменяется в процессе движения, m – тоже статический момент, но изменяющийся во времени. Маленькие буквы (u, i, m) обозначают функции, изменяющиеся во времени, большие (M, U) не изменяются.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.