


































1. ТИПОВЫЕ ПРОИЗВОДСТВЕННЫЕ МЕХАНИЗМЫ. КЛАССИФИКАЦИЯ.
К ним относится обширная группа промышленных установок, отличающихся значительным многообразием конкретных механизмов.
К числу наиболее важных классификационных признаков относят: назначение установки, её конструктивная установка, область применения, характер тех процесса.
- По назначению производственный механизм различают
1) подъемно-транспортные, относят многочисленную группу кранов (мостовые, козловые, портальные, перегрузочные мосты; промышленные манипуляторы и роботы, канатные дороги, горизонтальные и наклонные конвейеры, эскалаторы, элеваторы).
2) землеройные (одноковшовые и роторные экскаваторы (драглайн)).
3) машины, предназначенные для транспортировки газов и жидких веществ, а также для сжатия (центробежный насос, вентиляторы)
- По области применения: машиностроительные, металлургические горные строительные, судовые и другие машины, основные механизмы которых могут быть отнесены к числу общепромышленных.
- По характеру тех процесса:
1) механизмы циклического действия
2) непрерывного действия
В механизме циклического действия рабочий процесс состоит из повторяющих однотипных циклов, а у механизмов непрерывного действия рабочий процесс носит непрерывный характер. (краны, шахтные установки, лифты и т.д.) Примерами механизмов непрерывного действия является конвейеры, эскалаторы, канатные дороги.
Характер технологического процесса оказывает основное влияние на работу ЭП и определяет главное требование в отношении мощности, перегрузочной способности, динамических качеств, уровня автоматизации. Эти требования зависят и от других факторов, но определяются главным образом конкретным характером.
Так, например, механизм одного назначения, например, к конвейеру предъявляются к своему ЭП существенно различные требования, если один из них работает непрерывно, а технологический характер другого носит циклический характер. При изучении данного курса основное внимание сосредоточено не на частных особенностях конкретных машин, а на общих закономерностях свойственных однотипным электроприводам различных конструкций. С этой точки зрения, поставленные задачи наиболее полно соответствуют классификации производственных механизмов по характеру технологического процесса.
На этой основе изучения электропривода и автоматизации. ЭП удаётся систематизировать и удаётся обобщить, объединив различные по назначению конструкции, отрасли применения, машин и установок в группы однотипные по режиму работы, нагрузку ЭП и уровня автоматизации технологического процесса.
2. КЛАССИФИКАЦИЯ ТИПОВЫХ ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ ЦИКЛИЧЕСКОГО ДЕЙСТВИЯ
Обширная группа общепромышленных установок циклического действия включает в себя подъёмные краны, экскаваторы одноковшовые, стационарные подъёмные, маятниковые канатные дороги, конвейеры, различные манипуляторы и промышленные роботы. Общим для этих установок является режим работы, при котором технологический процесс состоит из ряда повторяющихся циклов, каждый из которых представляет собой законченную операцию загрузки рабочего органа, перемещения в исходную точку и выгрузку.
Основные механизмы таких установок, как правило, имеет реверсивный ЭП, рассчитанный для работы в интенсивном повторно-кратковременном режиме. В каждом рабочем цикле имеет место неустановившиеся режимы работы ЭП: пуск, реверс, торможение, оказывающее существенное влияние на производительность механизмов на динамические нагрузки, на КПД и на ряд других факторов.
Не смотря на большое разнообразие конкретных установок циклического действия их рабочие движения, обслуживается ограниченным числом однотипных механизмов. Подъёмные краны объединяют большую группу подъёмно-транспортных механизмов. На предприятии наибольшее распространение получили универсальные подъёмно-транспортные механизмы.
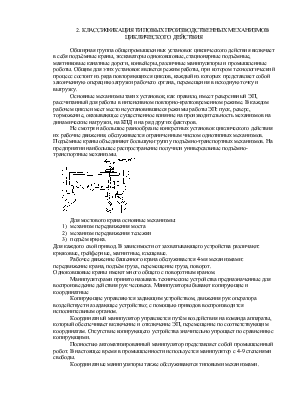
Для мостового крана основные механизмы:
1) механизм передвижения моста
2) механизм передвижения тележки
3) подъём крюка.
Для каждого свой привод. В зависимости от захватывающего устройства различают: крюковые, грейферные, магнитные, клещевые.
Рабочее движение башенного крана обслуживается 4-мя механизмами: передвижение крана, подъём груза, перемещение груза, поворот.
Одноковшовые краны имеют много общего с поворотным краном.
Манипуляторами принято называть технические устройства предназначенные для воспроизведение действия рук человека. Манипуляторы бывают копирующие и координатные
Копирующие управляются задающим устройством, движения рук оператора воздействует на задающее устройство; с помощью приводов воспроизводится исполнительным органом.
Координатный манипулятор управляется путём воздействия на команда аппараты, который обеспечивает включение и отключение ЭП, перемещение по соответствующим координатам. Отсутствие копирующего устройства значительно упрощает по сравнению с копирующими.
Полностью автоматизированный манипулятор представляет собой промышленный робот. В настоящее время в промышленности используется манипулятор с 4-9 степенями свободы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.