12. КРАНОВЫЕ ЭП С ТП
ТИРИСТОРНЫЙ КРАНОВЫЙ ЭП ПОСТОЯННОГО ТОКА
Применяется для крановых электроприводов мощностью выше 60кВт. Тиристорный электропривод на сегодняшний день практически вытеснил систему ГД на крановых механизмах. Применение тиристорного электропривода позволяет увеличить производительность и надежность работы электропривода за счет сокращения времени переходных процессов, обеспечения необходимого диапазона регулирования в различных режимах и возможности увеличения скорости, как спуска, так и подъема при работе с легкими грузами. А так же за счет исключения коммутационной аппаратуры в силовых цепях. Преимущество статических преобразователей перед системой ГД заключается в более удобном их размещении (не требуется специальных фундаментов), бесшумная работа, снижение эксплутационных расходов вследствие высоких эксплутационных показателей, так, при номинальной нагрузке и основной скорости КПД тиристорных преобразователей составляет 90- 92%, а при системе ГД при такой же нагрузке КПД 80-85%. Кроме всего прочего масса электрооборудования в системе ТП- двигатель на 30-50% меньше чем масса в системе оборудования ГД. В настоящее время тиристорные электроприводы по системе ТП- двигатель применяются для механизмов подъемов башенных кранов, для механизмов подъемов и передвижения на мостовых кранах, перегружателей, бетоноукладчиков и так далее. Электроприводы по системе ТП- двигатель обеспечивает высококачественное регулирование напряженно работающих крановых механизмов. Диапазон регулирования вниз по основной составляет 1:20. При использовании двухзонного регулирования диапазон вверх от основной 1:2. Мощность крановых электроприводов по системе ТП- двигатель может достигать 400-600 кВт. Особенностью тиристорного ЭП является то, что он в себе совмещает функцию выпрямителя и управляющего устройства, благодаря чему ЭП может подключаться непосредственно к сети переменного тока. Регулирование напряжения на выходе ТП осуществляется изменением в проводящую часть периода угла открывания тиристором относительно точки естественной коммутации. Среднее выпрямленное ЭДС в режиме непрерывных токов определяется:
Еd=Edo*cosα 
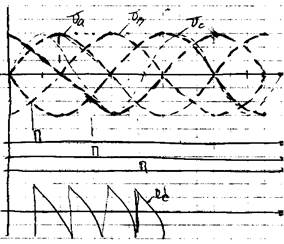
Для приведенного рисунка (1,2) коммутация считается мгновенной. На самом деле коммутация мгновенной не может быть из-за наличия индуктивности рассеяния.

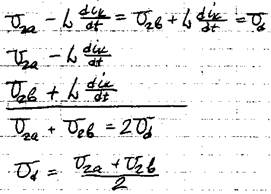
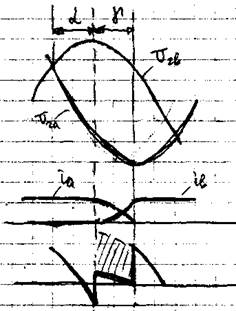
Таким образом при идеально сглаженном токе в цепи якоря двигателя (L=бесконечности) во время коммутации к нагрузке приложено напряжение равное полу сумме. Длительность интервала коммутации выраженное в электрических градусах называют углом коммутации (перекрыт). Значение угла коммутации зависит от тока нагрузки и от угла открытия.
Эффективность сопротивления:
Rγ=(m/2π)Xтф
Хтф= Х1/к2+ Хс/к2+ Х2
![]()
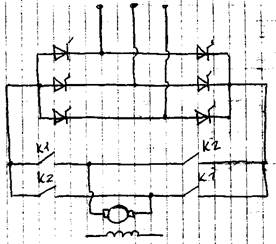 механич. реверс
механич. реверс
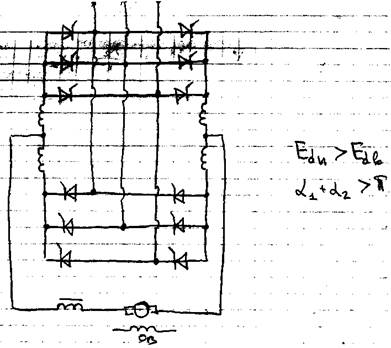
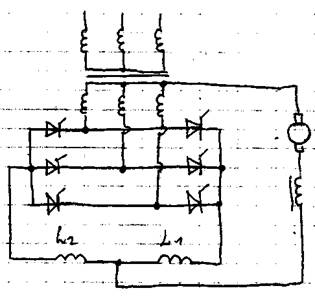
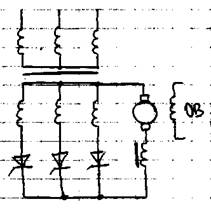
Торможение осуществляется при работе преобразователя в инверторном режиме(2й квадрант). для без контакторного реверса используется схема электро преобразователя с 2я комплектами вентилей, каждый из которых проводит ток в одном направлении. Группы тиристоров могут включаться !!!, когда каждая питается от одной обмотки трансформатора либо встречно параллельно. Для управления реверсивными комплектами вентилей могут быть использованы 2 принципа управления – совместный и раздельный.
КРАНОВЫЕ ЭП ПО СИСТЕМЕ ТП-Д (СХЕМЫ)
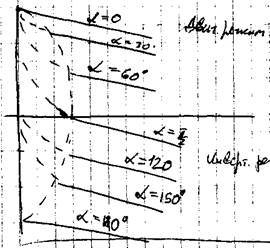
Достоинством ЭП постоянного тока является возможность увеличивать скорость подъёма и спуска при не полной загрузки механизма, для этого используется управление возбуждением ЭД и автоматическое регулирование скорости вверх от основной при постоянной мощности.
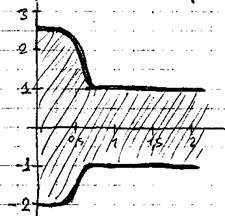
Заштрихованная область – это зона регулирования скорости механизма, а огибающая представляет собой наибольшую скорость, допустимую при данной нагрузке.
В общем случае скорость при подъёме выше скорости спуска. Узел логики сопоставляет скорость привода , тока якоря и учитывает положение контроллера. Если хотя бы одно требование не удовлетворяется (нагрузка выше определенного значения, скорость ниже номинальной, контроллер установлен не в крайнем положении) – команда на ослабление магнитного потока не выдается. На некоторых кранах производится увеличение скорости в 2-3 раза при работе с легкими грузами. Это позволяет иногда отказаться от вспомогательного механизма подъема. В настоящее время на кранах с ТП постоянного тока получило распространение принцип управления основанный на подчиненном регулировании параметров. Такие системы управления удовлетворяют требования высоких динамических показателей, легко поддаются наладке.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.