Координатные манипуляторы также обслуживаются типовыми механизмами.
3. ОБЗОР ТИПОВЫХ МЕХАНИЗМОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
К числу таких механизмов относятся различные конвейеры, экскаваторы, элеваторы, многокабинный подъёмник, вентиляторы, а также насосы и компрессоры поршневого действия. Все эти машины и механизмы кроме компрессоров объединены – их общая функция – транспортировка людей, грузов, жидкостей и газов. Различные по конструкции и специализации установки циклического действия как было установлено выше, все они предназначены для пространственного перемещения, с целью подъёмно-транспортных технологических операций. Особенностью механизма определяются сложностью траектории рабочего органа. Если по условиям технологии достаточно перемещать рабочий орган по одной пространственной координате применяется координатная машина. При необходимости пространственных перемещений по трём координатам требуются три механизма.
ЭП ТИПОВЫХ ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ ЦИКЛИЧЕСКОГО ДЕЙСТВИЯ
4. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ НАГРУЗОК ОДНОКОНЦЕВЫХ ТЯГОВЫХ ЛЕБЁДОК
Во всех случаях когда требуемое достаточно велики, составляет десятки сотни, даже тысячи метры. Универсальный механизм. Для этой цели служат тяговые подъёмные лебёдка, предназначенная для передачи усилия от привода к исполнительному органу при помощи каната соответствующей длины. По принципу работы под. Лебёдки бывают одноконцевые.
Одноконцевые лебёдки относятся к механизму не уравновешенного действия
Рис. 3. Кинематическая схема подъемной лебедки
 (1) без
учёта потерь на трение подъём груза:
(1) без
учёта потерь на трение подъём груза:
 (2) С
учетом потерь на трении.
(2) С
учетом потерь на трении.
Где
![]()
Спуск груза:
![]() - с
учётом потерь при спуске (3)
- с
учётом потерь при спуске (3)
Величина КПД обычно дается в технической литературе или определяется по экспериментальным кривым

Спуск пустого захватывающего устройства:
![]() (4)
(4)
 (5)
(5)
 (6)
(6)
При легком грузо-захватывающем устройстве – статический момент определяется по формуле 4, но для этого необходимо определить момент трения (Мтро)
![]()
![]()
 (7)
(7)

Берём точки на графике 1 и подставляем в формулу:
 (8)
(8)



 (9)
(9)
Для определения статического момента при опускании пустого грузозахватывающего устройства воспользуемся формулой М’ст2=Мгр0-М’тр0
Тут может быть 2 случая :
1) Мгр>М’тр0
Считаем что М’тр0 при опускании и подъеме одинаков.
М’ст2=Мгр0-Мгро(1-ηпо)/ ηпо=М2гро(1-(1- ηло)/ ηло)= М2гро(2-1/ ηло). (10)
2) Мгр<М’тр0
Считаем что вМп=0, тогда из формулы:
Мгр0= Мхх+ вМп получим Мгр0= Мхх
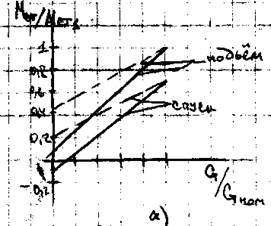

- - - для тяжёлого груза захватывающего устройства
– для лёгкого груза захватывающего устройства
Рис. 2. Пределы изменения нагрузок одноконцевых подъёмных лебёдок
Одноконцевая лебедка является механизмом неуравновешенного действия. Из рисунка 2 видно, что относительно оси вращения статическая нагрузка носит не симметричный характер, следовательно необходимо различная схема управления электроприводом. Все полученные соотношения могут быть использованы для расчета статических нагрузок одноконцевых наклонных подъемных лебедок, при этом вместо веса поднимаемых грузов (G0+Gгр) необходимо подставлять в формулу соответствующее значение натяжение каната.

F=Fгр+Fгр=(Gгр+G0)sinβ ± к(Gгр+G0)cosβ
К= 0,08÷0,15
К=Fтр/Fн
Определение статических нагрузок является важным этапом проектирования электропривода, оно необходимо для построения нагрузочной диаграммы, выбора мощности двигателя, для проверки по нагреву и так далее. Характер нагрузок и пределы их изменения в значительной степени определяют режим работы и выбор схемы электропривода. Изменение нагрузки одноконцевой лебедки является основным возмущением при работе электропривода, поэтому без знания пределов этого изменения невозможно построить схему управления которая обеспечивала бы требуемую точность регулирования. Кроме статического момента при выборе мощности двигателя необходимо знать динамический момент т.к. имеются пуски торможения, реверса и т.д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.