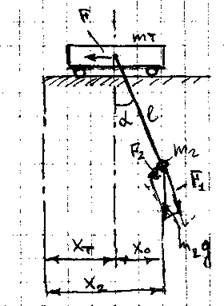
при рассмотрении статических и динамических механизмов подъемных и тяговых лебедок механизмов передвижения и поворотов механическая часть привода представляется жестким приведенным звеном, что не отражает действительный характер движения масс в системе так как не учитывается упругость звеньев механизмов. Характерной особенностью общепромышленных механизмов циклического действия являются повышенная податливость механических связей. Повышенная податливость вызвана наличием упругости канатов связывающих исполнительный орган с приводом, удлиненностью валов и так далее. Рассмотрим влияние упругих механических связей на примере раскачивания груза, подвешенного на канате, возникающие в каждом переходном процессе пуска механизма передвижения.
6. РАСКАЧИВАНИЕ ГРУЗОВ ПРИ РАБОТЕ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
![]()
![]()
![]()




Решим уравнение когда правая часть равна 0



![]()


![]()






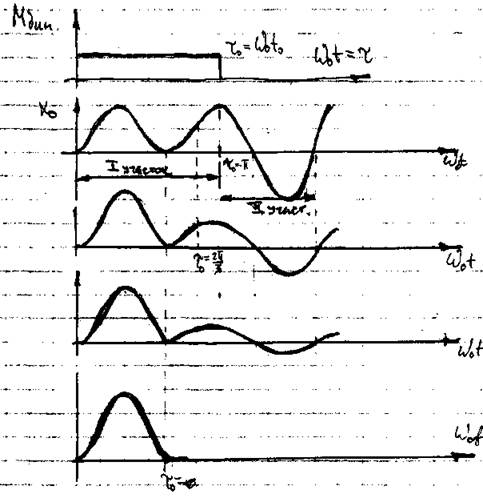
На 2м участке двигатель выключен, т.е. правая часть уравнения 1’ = 0 на 2м участке не нулевые начальные условия.
из приведенного примера видно что механизмы передвижения или поворота подвешенная масса совершает колебательные движения, раскачивается частотой зависящей от высоты подвеса и соотношения массы груза к массе тележки. Частота максимальна при минимальной частоте подвеса она составляет 0.2 – 0.3 Гц Являются нежелательными, тк вызывают увеличение переходных процессов, действующих на элементы механических конструкций крана. Мешает работе крановщика , затрудняет установку груза или ковша в намеченном месте. Если не предпринимать специальных мер, то груз может раскачиваться порядка 20-30 минут . Особенно неблагоприятно раскачивание ковша с расплавленным металлом в цехах завода, поэтому принимаются специальные меры по ограничению раскачивания груза. Ограничивают ускорения и рывки переходных процессов, т.е. формируют плавный характер процессов.
Из уравнения (2) так же видно что амплитуда колебаний прямо пропорциональная динамическому моменту, следовательно при его уменьшении так же будет уменьшаться амплитуда колебаний, однако этот способ ограничения раскачивания грузов увеличивает время переходных процессов, что может привести к уменьшению производительности. Возможно использовании при пуске и торможении двигателей с относительно мягкими механическими характеристиками, в этом случае кинетическая энергия раскачиваемого груза преобразуется в электрическую энергию двигателей, тем самым уменьшается кинетическая энергия и быстрее затухают колебания. Для предотвращения раскачивания грузов целесообразно рациональное действие крановщика, возможность использования такого способа следует из графика хо (t).
Если крановщику удается остановить двигатель в тот момент когда груз точно находится под центром тяжести тележки то колебания вообще отсутствуют. т.к. то крановщик может успеть выполнить указанную операцию, наблюдая за положением груза относительно тележки крана. Если в момент крановщик увеличит момент в 2е то колебания тоже прекратятся , в этом случае пуск будет прекращаться с ускорением = 2м средним ускорениям. Дальше пуск будет осуществляться с неизменной амплитудой. для этого способа требуется возможность увеличения момента в 2е, т.е. двигатель мощность в 2 раза больше чем требуется. Одним из эффективных способом уменьшения колебаний является ограничение темпа нарастания динамического момента. Эффективным способом является использование следящего ЭП с ОС по отклонению груза от своего положения равновесия, однако реализация этой задачи связана с отсутствием простых и надежных датчиков отклонения грузов.
7. МЕХАНИЧЕСКИЕ ПЕРЕГРУЗКИ ЭП ТИПОВЫХ МЕХАНИЗМОВ ЦИКЛИЧЕСКОГО ДЕЙСТВИЯ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.