Механические перегрузки являются важной особенностью рабочих режимов для большинства общепромышленных механизмов циклического действия. Для механизмов на рельсовом ходу механические перегрузки могут возникнуть из-за различия диаметров ходовых колес. У той опоры где меньше диаметр ходового колеса - будет наблюдаться упругое проскальзывание. При раздельном приводе из-за различия линейных скоростей так же будет наблюдаться перекос. При раздельном приводе расхождение линейных скоростей за счет угловых скоростей ЭП в 4-6 раз больше чем за счет неравенства диаметров ходовых колес. При достаточно жестких механических характеристиках в конструкции механизма передвижения происходит перекос. Этот перекос может усилиться за счет ветровых нагрузок для козловых кранов. Практикой установлено что при наиболее неблагоприятных механических характеристиках и наступивших явлениях перекоса значительность усилий передаваемых на колеса могут составлять +_ 25% при пролетах 25 метров. У кранов с большими пролетами (50 м и выше) перекос может вызвать нежелательные перенапряжения в металлоконструкциях. Перегрузки крюковых подъемных лебедок могут возникнуть при подхвате примерзшего или заклиненного груза. Наиболее частые и тяжелые механические перегрузки возникают у тех механизмов для которых при нормальном режиме работы возможна работа на упор – механическое стопорен рабочего органа. Механическими перегрузками и стопорениями характеризуется работа механизма участвующая в черпании грунта или перемещении материала (напорное, подъемные лебедки). Стопорения могут быть резкие и мягкие. К мягким стопорениям относятся например работа в мягких грунтах, в этом случае перегрузка нарастает постепенно во времени и крановщик в случае необходмимости может принять меры что бы предотвратить стопорение. Резкое стопорение возникает при внезапных заклиниваниях рабочего органа например при черпаньи скальной породы экскаватора. Во всех случаях, когда механические перерузки превосходят перегрузочную способность привода или допустимую нагрузку механизма = должно обеспечиваться автоматическое ограниченатиче развиваемого двигателя. Допустимый момент двигателя определяется с одной стороны нагрузкой механизма по условиям прочности, с другой стороны кратность этого момента по отношению к номинальному не должна превосходить перегрузочную способность двигателя. Выбранный из этих условий значение момента двигателя называется допустимым стопорным моментом Мст. λ= Ммах/ Мном=1.5-1.8 если нагрузки не систематические, то система ограничения вступает как защитное устройство, осуществляющие отключение привода. Примером такого ограничения момента является максимальная защита двигателя. Кроме электрических защитных устройств есть механические. Предусматривается ослабленное звено, например шпонка, которая срезается при механических перегрузках. Если работа механизма систематически сопровождается перегрузками, то предусматривается автоматическое ограничение момента, не взывающая перегрева в работе механизма. Непрерывно ограничение момента может осуществлено как электрически так и механическим путем. Для электрического ограничения момента может применяться
Экскаваторные характеристики оцениваются заполнением характеристики и коэффициентом отсечки. котс=Мотс/Мстоп (1)
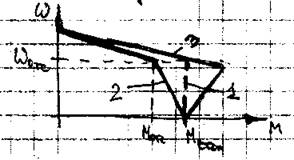
Рассмотрим особенности стопорения для механизма подъема экскаватор-лопата в переходных процессах При встрече ковша экскаватора с невзорванной скалой
![]()






![]()


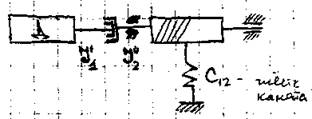
Решение уравнения (2) относительно момента М12 – натяжение каната решение можно представить в следующем виде
С3=Мотс-Мстоп= -βωнач
![]()
![]()
М12=Мстоп+е-αt(С3 сosΩt+ С4 sinΩt)=Mстоп+ е-αt(((С12ωнач –αβωнач )/Ω)*sin Ωt-βωначcosΩt) (8)
M12=Мстоп+ ωначβ SQRT(1+((C12-αβ)/ βΩ)2) е-αtsin(Ωt-φ2) (9)
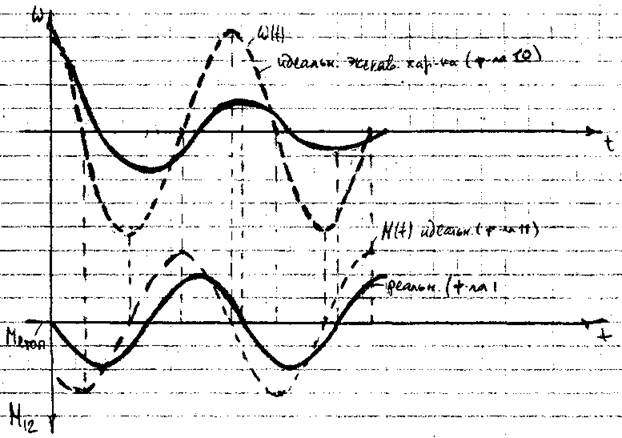
(рис 11)Кривые натяжения каната, скорости двигателя и переходного процесса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.