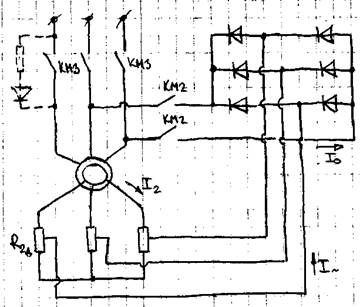
В данной схеме используется несимметричное соединение сопротивлений в роторной цепи. Ассиметрия не большая, поэтому это практически не отражается на механической характеристике. Для симметричного соединения сопротивление роторной цепи при тех же регулировочных характеристика требуется 3 дополнительных силовых контакта, и соответственно увеличиваются габариты контроллера. Как видно из рисунка 2 данная схема обеспечивает регулирование скорости в небольшом диапазоне и ограничение токов и моментов электроприводов при пуске осуществляется оператором, который постепенно переставляет рукоятку контроллера из нулевого положения в положение 5 с допустимым темпом. Для данной схемы при использовании для подъема невозможно получить пониженную скорость пуска груза т.к. ограничен диапазон регулирования. С этой целью оператор периодически устанавливает контроллер в нулевое положение и накладывает механический тормоз. При управлении привода посредством силового контроллера оператор должен переводить рукоятку из одного положения в другое с некоторым интервалом, т.к. в противном случае могут возникнуть недопустимые броски тока особенно в режиме противо-включения.
Выводы: механические характеристики АД с фазным ротором и торможением противо-включением при контроллерном управлении обеспечивают вполне удовлетворительный режим работы механизма передвижения. Для механизма подъема эти схемы мало пригодные т.к. нет устойчивой пониженной скорости. Таким образом приведенная схема применяется на кранах малой и средней мощности для механизмов передвижения.
Для крановых электроприводов с электроуправлением в настоящее время находят широкое применение двигатели постоянного тока серии Д с последовательным возбуждением. Их широкое применение объясняется простотой и высокой надежностью релейно-контакторной аппаратуры постоянного тока.
ЧТО-ТО ДОЛЖНО БЫТЬ
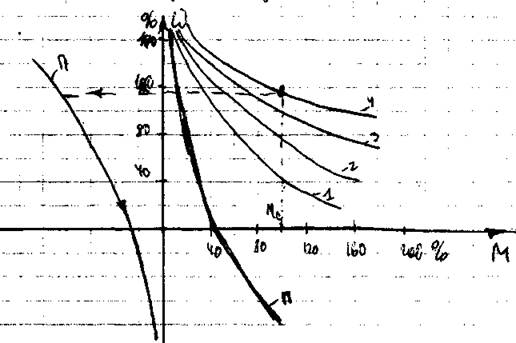
Рис1.- механические характеристики ДПТ с последовательным возбуждением.
В цепь якоря двигателя включена катушка тормозного магнита, растормаживающего двигатель при подаче питания к его якорю. Пуск двигателя осуществляется введением сопротивления в цепи якоря функции независимой выдержки времени, что обеспечивается реле ускорения.
Для защиты двигателя от перегрузок служит реле КА2 включенное в цепь якоря двигателя. В схеме предусмотрен автоматический контроль тока якоря при торможении противовключением, для чего главную цепь двигателя включены реле противовключения входа в перед КПВ и реле противовключения хода назад КПН. При пуске в первом положении рукоятки контроллера цепь якоря двигателя включается полностью все сопротивления. При втором положении рукоятки контроллера якоря возбуждается контактор КМ2, обесточивается КУ3, при переводе в 3е положение последовательно срабатывают контакторы КМ3У – КМ5У и выводятся полностью все сопротивления и двигатель переходит на естественную характеристику. Для торможения крановщик переводит рукоятку контроллера в положение назад в цепь якоря двигателя включаются полностью все сопротивление и двигатель работает на характеристике в «П». При достижении скорости 0 возбуждается реле КПН создается возможность для возбуждения контактора ТМ2 далее последовательно срабатывают контакторы КМ3У – КМ5У.
В настоящее время промышленность выпускает электроприводы для механизмов подъема с контроллерным управлением с существенно лучшими регулировочными характеристиками за счет введения при спуске груза режима динамического торможения.

Мех хар-ки с ККТ-65
Механические характеристики говорят о том что использование режима динамического торможения обеспечивает устойчивые низкие скорости спуска грузов. Диапазон (Д) регулирования при спуске до 5. Данная схема используется только для хорошо возбуждаемых двигателей. В случае плохого самовозбуждения предусматривается цепь дополнительной подпитки статорной обмотки постоянного тока по однополупериодной схеме. Ток подпитки для плохо возбуждаемых двигателей может достичь 20-30% от номинального. Наличие цепи подпитки контролируется реле ККТ. В схеме также предусмотрен контроль целостности силовых вентилей. Когда работает двигатель в двигательном режиме – постоянно осуществляется контроль пробоя вентилей. Контроль осуществляет реле ККД.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.