Мдин = JΣ*dω/dt = JΣ*εдон

![]()
Одноконцевые лебедки являются неуравновешенными механизмами. Нагрузки привода которых определяются суммой весов всех поднимаемых частей: каната, грузозахватывающего устройства, полезного груза, наличие грузозахватывающего устройства приводит к соответствующему увеличению удельного расхода энергии на единицу полезного груза. В стационарных установках (подъемниках) этот недостаток устраняется использованием двухконцевых подъемных лебедок.
5. ОПРЕДЕЛЕНИЕ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ НАГРУЗОК ДВУХКОНЦЕВЫХ ЛЕБЁДОК, ПОВОРОТНЫХ МЕХАНИЗМОВ, ТЕЛЕЖЕК ПЕРЕДВИЖЕНИЯ
Если установка обслуживает 2 уровня, то вес подъемного сосуда уравновешивается весом второго подъемного сосуда, при этом достигается повышение производительности так как при подъеме груза одновременно осуществляется спуск 2го сосуда, если подъемная установка обслуживает несколько уровней (лифты многоэтажных зданий) то в этом случае вместо 2го подъемного сосуда подвешивается противовес (контр груз). Что бы снизить мощность приводного двигателя вес противовеса берется несколько большим чем вес подъемной кабины, т.е. контргруз уравновешивает часть поднимаемого груза.
Gпр=G0+α*Gгр.ном α= 0.3÷0.6
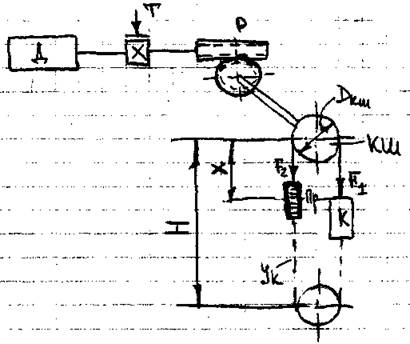 УК – уравновешивающий канат,
УК – уравновешивающий канат,
Усилие на канатоведущем шкиве (КШ) определяется разностью натяжения ветвей подъемного каната.
F=F1-F2
F1=G0+Gгр+q*x±F’тр
F2=G0+ α*Gгр.ном +q*(H-x)- (±)F’’тр
F= G0+Gгр+q*x±F’тр- G0-α*Gгр.ном -q*(H-x) ±F’’тр
F= Gгр -α*Gгр.ном +q*(2х-H) ±Fтр (1)
Как видно из формулы №1 усилие на канатоведущем шкиве имеет активную составляющую, определяемую весом груза и активную составляющую (определяется трением направляющих). Статический момент также определяется активной составляющей и реактивной составляющей.
Мст1=Мгр+Мтр - для подъема груза
Мст2= -Мгр+Мтр - для подъема пустой кабины
Мст1=[Gгр.ном(1-α)*Dкш]/[2*ip*ηном] (2) – для подъема номинального груза.
Мст2= -[ α * Gгр.ном*Dкш* ηном]/[2*ip] (3) – для подъема пустой кабины.
М’ст1=Мгр –Мтр=[Gгр.ном(1-α)*Dкш*ηном]/[2*ip] (4) – спуск номинального груза
М’ст2= -Мгр –Мтр= -[ α * Gгр.ном*Dкш]/[2*ip*ηном] (5) – силовой спуск груза
Для подъемных установок не большой высоты (15-20м ) высоты q*(2х-H)=0 для подъема номинального груза
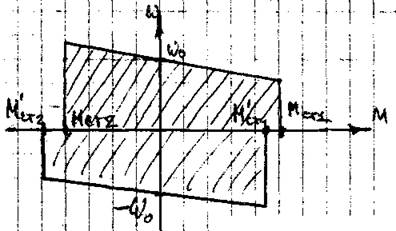
Рис.2. Приделы изменения статического момента двухконцевой лебёдки при α=0.5
Сравнивая предел изменения нагрузки с одноконцевыми – можно заключить что нагрузки 2х концевых лебедок изменяются в более широких пределах и симметрично относительно направления вращения. Соответственно при проектировании выбираются симметричные схемы электропривода. При расчете 2хконцевых подъемных лебедок, в которых вместо противовеса используется 2й подъемный сосуд можно воспользоваться соотношениями 2-5 полагая α=0 динамическая нагрузка 2х концевых подъемных установок определяется суммарным приведенным моментом инерции установки и допустимым ускорением.
Мдин=JΣ * εдоп
Jпр=Jдв+Jвр/i2 +(mгр+mпр+mк+mкаб)*ρ2
ρ=V/ω
момент инерции механизма подъемных лебедок превышает 2-5 раз момент инерции двигателя. Эта отличительная особенность 2х одноконцевых лебедок.
Рис.3. Кинематическая схема механизма передвижения

![]()
μ- коэффициент трения в опорах тележек = 0.015
f - коэффициент трения качения = 0.00005
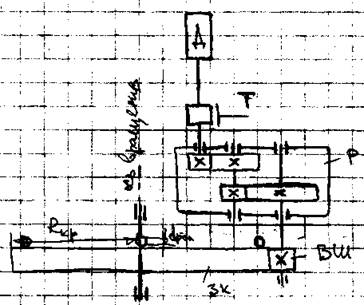
Рис. 4. Кинематическая схема поворотного механизма

Важнейшей особенностью механизма движения и поворота является большая механическая инерция влияние которой тем больше чем тяжелее движущиеся сооружения и чем выше скорость движения приведенный к валу момент инерции движущихся масс для механизмов передвижения и поворота в 10-30 масс превышает Поэтому для таких механизмов при большой частоте включения динамические нагрузки определяют мощность двигателя т.к. статические нагрузки не велики по сравнению с динамическими.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.