Электрооборудование и управление ЭП малой и средней мощности.
На экскаваторах малых применяется групповой дизельный или асинхронный ЭП.
Рабочие механизмы приводятся в движение от основного вала с помощью кулачковых и фрикционных муфт. Экскаваторы с групповым приводом имеют сложную кинематическую схему и более громоздкие механические передачи. В зависимости от емкости ковша мощность приводного двигателя принимается от 50 до 250 кВт. В качестве приводного двигателя используются двигатели общепромышленных типов. Защита двигателя осуществляется автоматическими выключателями, имеющими нулевую и максимальную защиту.
Для питание экскаваторов малой мощности используется напряжение переменного тока 380 В, для экскаваторов средней мощности используются высоковольтные двигатели. В настоящее время выпускаются экскаваторы малой мощности индивидуальным приводом по системе ТП , а так же насыщения в цепи статора при электроприводе переменного тока.
Для экскаватора средней производимости до 400 м3 в час используются следующие системы раздельных ЭП
В современных экскаваторах на переменном токе используются ЭД с ограниченным максимальным моментом или дросселями насыщения, обеспечивающими ограничения момента двигателя.
Опыт эксплуатации ЭП экскаватора с АД показал, что при релейном контакторном управлении двигатели не обеспечивают высокой производительности и дают повышенный процент выхода из строя канатов. Характерным примером применения 3х обмоточный генератор двигатель служит экскаватор средней мощности ЭКГ4, ЭШ -5\45.
Основное элктро оборудование экскаватора состоит из гонного двигателя, генераторов и двигателей подъема, напора, поворота. механизм хода и открывания ковша имеют отдельные двигатели. Экскаватор имеет 2 токоприемника высокого напряжения и низкого напряжения. Токоприемник высокого напряжения служит для подвода питания к установкам вспомогательного оборудования. Масляный выключатель служит для подключения гонного двигателя который приводит во вращение ГП , ГН, ГПТ. От генератора напора получают питание двигатели механизма напора и двигатель механизмов хода. От генераторов поворота питаются 2 двигателя хода. которые включены параллельно. Это сделано для большей надежности. Механизм может работать и от одного двигателя. Для системы возбуждения используется отдельный генератор, от которого так же питается и двигатель открывания днища ковша. Все главные механизмы экскаватора управляются по системе генератор-двигатель. Управление двигателем производится посредством командо-контроллера, имеющего 4 положения подъема и 4 положения спуска. Регулирование скорости осуществляется изменением тока независимой обмотки генератора. Реверсирование осуществляется так же изменением направления тока в обмотки возбуждения.
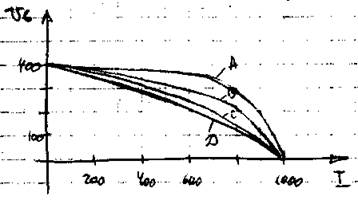
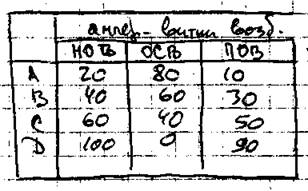
Особенность характеристик состоит в том что они автоматически обеспечивают ограничение тока до величины безопасной по электрическим и механическим условиям. При возникновении аварийных условий токовая обмотка возбуждения размагничивает генератор, тем самым снижая его ЭДС. Такая «самозащита» очень полезна в приводах экскаваторов при работа на упор. Величина тока упора может изменяться путем выбора (уставки) обмотки независимого возбуждения. Если проанализировать работу механизма подъема, то на первом положении контроллера в момент двигателя при троганьи составляет около 50 % номинального момента. Дальнейшее увеличение скорости производится перемещением команда контроллера в 4е положение. Перевод рукоятки в 0 положение обеспечивает динамическое торможение. Для улучшения динамических характеристик система 3х обмоточный генератор-двигатель в обмотках возбуждения генератора используются магнитные усилители. С помощью магнитных усилителей можно добиться полного соответствия динамических и статических характеристик, обеспечить более плавное и глубокое регулирование скорости, и повысить коэффициент заполнения статических характеристик. В настоящее время широкое распространение получила эта система.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.