Принцип действия роторных многочерпаковых экскаваторов основан на зачерпывании грунта черпаками, закрепленными на вращающихся роторах или непрерывной движущейся цепи. Из черпаков грунт подается на систему транспортеров, передающих от него в обвал или в транспорт. Основные механизмы одноковшовых экскаваторов обычно работаю в повторно- кратковременном режиме с продолжительностью включения ПВ 25-100%. Главным механизмом многоковшовых роторных экскаваторов работаю в длительных режимах при пиковых колеблющихся нагрузках, обусловленными врезанием черпаков в грунт. Перегрузка механизма может вызываться чрезмерным погружением черпаков. Зацеплением их за камень или заедание черпаковой цепи в направляющей раме.
Современные экскаваторы работают в условиях тряски, вибрации, запыленности и резких температурных колебаний и так далее. На механизмы экскаватора оказывают влияние крен и дифферент. Тяжелые условия работы обуславливают повышенные требования механической прочности и конструктивной надежности экскаваторного оборудования. ЭП основных механизмов и экскаваторов с емкостью ковша до 10 м3 имеют мощности измеряемые 100 кВт. Все это определяет расход энергии на кубометр . При этом стоит иметь в виду что экскаваторы работают в полевых условиях и получают питание от полевых сетей ограниченной мощности. Если к этому добавить необходимость повышенной управляемости приводов можно сделать вывод по сложности требования к электроприводу экскаватора среди производственных механизмов занимают одно из первых мест. Требования, предъявляемые к электроприводу одноковшовых и многоковшовых экскаваторов имеют существенное различие. Основные требования к электроприводу требующие:
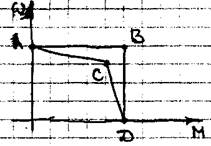
Высокая производительность экскаватора и защита его механизма от поломок при перегрузке обеспечивается использованием систем электропривода ограничивающих вращающий момент ЖД безопасной величиной и имеющих при номинальных нагрузках достаточно жесткие механические характеристики.

Коэффициент заполнения экскаваторной составляет 0.8 – 0.85 при таком коэффициенте экскаваторщик успевает принять меры, когда начинает снижаться скорость.

механическая характеристика электроприводов экскаватора.
АД применяется в экскаваторе емкостью ковша до 1м3. Для экскаваторов средней и большой мощностей используется система ГД. Наиболее полно предъявляемым требованиям отвечают механические характеристики систем ТП – ДПТ в качестве двигателя используется машина постоянного тока с независимым возбуждением. Эта система применяется во всех экскаваторах большой мощности.
ЭП многоковшовых и роторных экскаваторов должен удовлетворять следующим требованиям:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.