 ,
(14.6)
,
(14.6)
где k — число предыдущих отсчетов, учитываемых при таком линейном предсказании; Сi — коэффициенты влияния (j – i)-го отсчета на j-й.
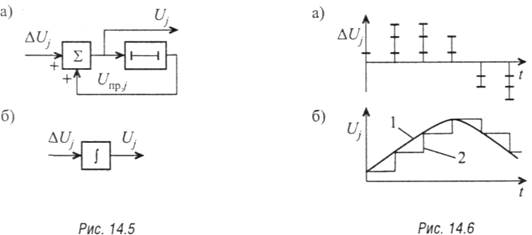
Приемная часть системы ДИКМ при предсказании первого порядка имеет вид, показанный на рис. 14.5, а. На рис. 14.5, б приведен аналог этой системы, выполненный на основе интегратора. Осциллограммы поясняют процессы в отдельных точках кодера (рис. 14.6, а) и декодера ДИКМ (рис. 14.6, б) с таким предсказателем. На рис. 14.6, а показаны квантованные отсчеты разностного сигнала, а на рис. 14.6, бсплошная кривая 1 соответствует входному сигналу, а ступенчатая 2 — предсказанному, полученному в цепи обратной связи. Аналогичный вид имеет восстановленный квантованный сигнал на выходе интегратора приемника.
 Реализация
кодера и декодера ДИКМ отличается построением предсказателя. При этом возможны
два варианта: аналоговый и цифровой. Декодер ДИКМ с аналоговым предсказателем
первого порядка упрощенно показан на рис. 14.7; временные диаграммы,
иллюстрирующие его работу, представлены на рис. 14.8. Здесь используются два
ключа S1 и S2, которые открываются в разные моменты
времени (рис. 14.8, б, в), чтобы исключить самовозбуждение пред
сказателя. Разностный квантованный сигнал (рис. 14.8, а), получаемый
с выхода декодера 4 (см. рис. 14.1, 14.2), складывается с предсказанным
сигналом, получаемым на накопительном конденсаторе С2. В момент t1 (при включении S1) эта сумма сигналов заряжает
промежуточный накопитель С1 (рис. 14.8, д). Затем ключ S1 отключается, разрывая цепь
обратной связи, а в момент t2 (при включении 52) происходит «дозаряд»
накопителя С2 до напряжения, равного Uc1(рис. 14.8, г).
Реализация
кодера и декодера ДИКМ отличается построением предсказателя. При этом возможны
два варианта: аналоговый и цифровой. Декодер ДИКМ с аналоговым предсказателем
первого порядка упрощенно показан на рис. 14.7; временные диаграммы,
иллюстрирующие его работу, представлены на рис. 14.8. Здесь используются два
ключа S1 и S2, которые открываются в разные моменты
времени (рис. 14.8, б, в), чтобы исключить самовозбуждение пред
сказателя. Разностный квантованный сигнал (рис. 14.8, а), получаемый
с выхода декодера 4 (см. рис. 14.1, 14.2), складывается с предсказанным
сигналом, получаемым на накопительном конденсаторе С2. В момент t1 (при включении S1) эта сумма сигналов заряжает
промежуточный накопитель С1 (рис. 14.8, д). Затем ключ S1 отключается, разрывая цепь
обратной связи, а в момент t2 (при включении 52) происходит «дозаряд»
накопителя С2 до напряжения, равного Uc1(рис. 14.8, г).

 Цифровой
вариант предсказателя ДИКМ представлен на рис. 14.9. Здесь цифровой разностный
сигнал ∆Nj впараллельном
k-разрядном коде поступает на первые входы
цифровогосумматора 1. На вторые входы подается в параллельном коде л-разрядное
число, соответствующее предсказанному значению Nnр.j (n > k). Это число хранилось в блоке буферной
памяти 2. На выходе сумматора / образуется двоичное число Nj = Nnp.j +∆Nj, которое в параллельном n-разрядном коде поступает в линейный ЦАП
(блок эталонов) 3 и блок 2. На выходе ЦАП получается квантованный
отсчет Uj, соответствующий числy Nj.
Цифровой
вариант предсказателя ДИКМ представлен на рис. 14.9. Здесь цифровой разностный
сигнал ∆Nj впараллельном
k-разрядном коде поступает на первые входы
цифровогосумматора 1. На вторые входы подается в параллельном коде л-разрядное
число, соответствующее предсказанному значению Nnр.j (n > k). Это число хранилось в блоке буферной
памяти 2. На выходе сумматора / образуется двоичное число Nj = Nnp.j +∆Nj, которое в параллельном n-разрядном коде поступает в линейный ЦАП
(блок эталонов) 3 и блок 2. На выходе ЦАП получается квантованный
отсчет Uj, соответствующий числy Nj.
Как и в системах с ИКМ, при использовании ДИКМ возникают ошибки при восстановлении отсчетов (U'j ≠ Uj), которые обусловлены двумя причинами:
а) квантованием разностного сигнала y(t) = ∆U(t) = U(t) – Unp(t);
б) ограничением сигнала y(t), когда его размах превышает пороги шкалы квантования кодера. Ограничение сигнала y(t) приводит к тому, что предсказанный сигнал Unp(t)не успевает «отслеживать» сигнал U(t). Возникающие при этом искажения восстановленного сигнала называют шумом перегрузки.
Действующее значение σу
случайного сигнала y(t) для разных абонентов будет изменяться в интервале σу
![]() [σу.м;
σу.б], где, как и ранее, индекс «м»
соответствует слабому (малому) абоненту, а индекс «б» — сильному (большому).
Максимальное (пиковое) значение сигнала y(t) будет определяться самым сильным
абонентом: Упик.б = max[yб(t)] = σy.бKп,
где Кп— пик-фактор разностного сигнала.
[σу.м;
σу.б], где, как и ранее, индекс «м»
соответствует слабому (малому) абоненту, а индекс «б» — сильному (большому).
Максимальное (пиковое) значение сигнала y(t) будет определяться самым сильным
абонентом: Упик.б = max[yб(t)] = σy.бKп,
где Кп— пик-фактор разностного сигнала.
Положим сначала, что шумы ограничения отсутствуют, т.е. порог ограничения кодера выбран не менее упик.б. Если шкала квантования симметричная и равномерная, а число уровней квантования равно L, то, учитывая материалы параграфа 12.3, получаем:
шаг квантования
 ,
(14.7)
,
(14.7)
мощность (дисперсия) шума квантования
 , (14.8)
, (14.8)
отношение сигнал—шум
квантования для произвольного абонента с действующим напряжением Uд![]() [Uд.м; Uд.б]
[Uд.м; Uд.б]
 .
(14.9)
.
(14.9)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.