Тактовая частота следования Fтопределяется по аналогии с (14.23) из условия
Sпик.бТт ≤ ∆mах, (14.32)
где Sпик.б находим из выражения S2пик.б = 9U2д.б(2π800)2 [см. пояснения к (14.29)] или из (14.27).
Объединяя (14.31), (14.32), получим окончательное выражение для ОСШ квантования в системе ДМ с цифровым командированием (ДМЦК): для A-закона:
 ; (14.33)
; (14.33)
для μ-закона:
 . (14.34)
. (14.34)
При этом для обоих законов должно выполняться условие [см. (14.32)]
 , (14.35)
, (14.35)
где знак [X] означает число, ближайшее большее к X и равное целой степени числа 2; f0 — см. примечание к (14.28).
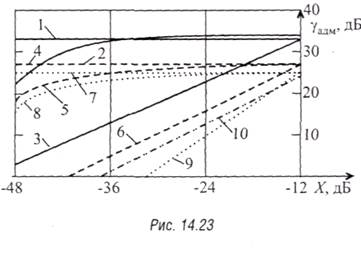 Расчетные
зависимости ОСШК для адаптивной ДМ с цифровой компрессией γадм от переменной Х = 201g(Uд/Uпик.б), выполненные по формуле (14.33),
приведены на рис. 14.23 [32]. Графики 1—9 рассчитаны для ряда значений Fт, nс, и Nc,
которые сведены в
табл. 14.4. Под номером 10 приведен для сравнения график зависимости
ОСШК для линейной ДМ при FT= 64 кбит/с. Число разрядов q для PC (и соответственно входного числа N1),
а также число
разрядов р выходного числа N2 (и соответственно ЦАП)
рассчитывают с учетом (14.35) из (13.24), (13.25). При этом, как и ранее, числа
р и q характеризуют только модуль чисел N1и N2,
знак их учитывается отдельно.
Расчетные
зависимости ОСШК для адаптивной ДМ с цифровой компрессией γадм от переменной Х = 201g(Uд/Uпик.б), выполненные по формуле (14.33),
приведены на рис. 14.23 [32]. Графики 1—9 рассчитаны для ряда значений Fт, nс, и Nc,
которые сведены в
табл. 14.4. Под номером 10 приведен для сравнения график зависимости
ОСШК для линейной ДМ при FT= 64 кбит/с. Число разрядов q для PC (и соответственно входного числа N1),
а также число
разрядов р выходного числа N2 (и соответственно ЦАП)
рассчитывают с учетом (14.35) из (13.24), (13.25). При этом, как и ранее, числа
р и q характеризуют только модуль чисел N1и N2,
знак их учитывается отдельно.
Параметры зависимости ОСШК для АДМ (по рис. 14.23)
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Fт |
64 |
64 |
64 |
48 |
48 |
48 |
32 |
32 |
32 |
64 |
|
nc |
16 |
8 |
4 |
16 |
8 |
4 |
16 |
8 |
4 |
– |
|
Nc |
32 |
32 |
32 |
16 |
16 |
16 |
8 |
8 |
8 |
– |
Из анализа рис. 14.23, который удобно сравнивать с рис. 13.57, б, следует, что при скорости передачи 64 кбит/с адаптивная ДМ несколько уступает по величине ОСШК «стандартной» АИКМ, а при скорости 48 кбит/с АДМ превосходит на 2—3 дБ вариант АИКМ. Наконец, при скорости 32 кбит/с АДМ обеспечивает во всем динамическом диапазоне значение γадм ≥ 23 дБ, что значительно лучше АИКМ, которая при этой скорости явно непригодна.
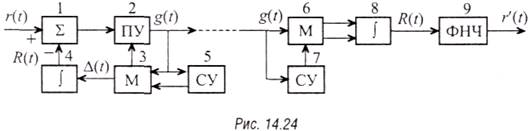
Если кодер и декодер АДМ реализуются на основе аналоговой схемотехники, компрессия по цифровому сигналу g(t) осуществляется по схеме рис. 14.24. Здесь шаг квантования (слежения) меняется с помощью новых блоков — модулятора Зи схемы управления 5. Модулятор представляет собой, например, частотно-независимый ослабитель (усилитель) с регулируемым (дискретно или непрерывно) коэффициентом передачи. Цифровой сигнал g(t), поступающий на вход модулятора, предварительно преобразуется в последовательность сигналов +1 и –1. Схема управления (СУ) проводит анализ этого сигнала и в результате формирует сигнал управления, который поступает в модулятор и изменяет шаг квантования на его выходе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.