Основное влияние на выбор параметров системы ДМ оказывают сигналы с большой амплитудой и большой скоростью изменения. Для уменьшения Sпик используют амплитудную и (или) частотную компрессию, которая может быть применена как к аналоговому, так и к цифровому сигналу.
При аналоговой компрессии вводят предыскажения сигнала на передаче (до схемы вычитания 7 на рис. 14.13) и восстановление сигнала на приеме (обычно после интегратора 5 на рис. 14.12, б). Эти предыскажения осуществляют:
– по динамическому диапазону (с помощью частотно-независимых компандерных устройств);
– по частоте, применяя частотно-зависимые линейные цепи;
– одновременно по динамическому диапазону и частоте.
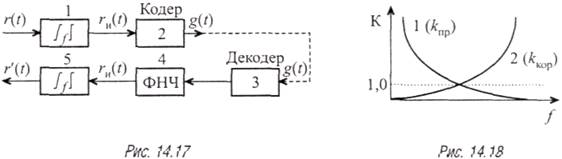
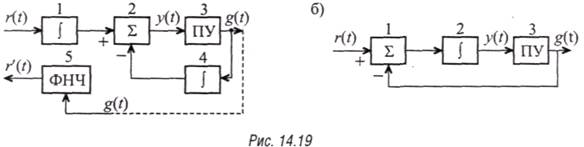
Частотные предыскажения аналогового сигнала (рис. 14.17) реализуются за счет введения на передающей стороне предыскажающего контура 1, а на приемной — корректирующего контура 5. Остальные блоки — кодер 2, декодер 3 и ФНЧ 4 — образуют классическую (линейную) систему ДМ. Пусть сигнал r(t) имеет вид r(t) = Umsinωt, тогда скорость его изменения равна S(t) = Umωcosωt. Если уменьшить амплитуду скорости Sm = Umω, то, как следует из (14.23), можно увеличить Tт = 1/Fт при неизменном значении ОСШ квантования. Уменьшения Sm можно добиться, пропуская r(t) через четырехполюсник с падающей частотной характеристикой Kпр(f), как у интегратора (кривая 1 на рис. 14.18). Очевидно, чтобы восстановить искаженный сигнал rи(t) до сигнала r(t) на приемной стороне, необходимо поставить четырехполюсник с обратной частотной характеристикой Kкор(f), как у дифференцирующего звена (кривая 2 на рис. 14.18). Предыскажающий и корректирующий (восстанавливающий) четырехполюсники можно подобрать таким образом, чтобы частотная характеристика последовательно включенных интегратора 3 декодера ДМ и корректирующего четырехполюсника 5 в диапазоне частот сигнала r(t) была бы постоянной. Тогда на приемной стороне указанные блоки можно исключить, в результате приемник будет содержать только фильтр нижних частот и усилитель. Предыскажающее устройство остается на передающей стороне (рис. 14.19, а). Дальнейшее упрощение структуры системы ДМ может быть получено путем приведения кодера к схеме, показанной на рис. 14.19, б. Здесь используется очевидное равенство
![]() , где y(t)
— разностный сигнал на входе порогового устройства 3.
, где y(t)
— разностный сигнал на входе порогового устройства 3.
Такой вариант построения называется системой дельта-сигма-модуляции (ДСМ). Для анализа ДСМ удобнее использовать исходную структуру, показанную на рис. 14.17. Для нее дисперсия шумов квантования с учетом корректирующего контура 5 (дифференцирующего звена) равна
 .
.
Положим для примера,
что спектр входного сигнала r(t)
равномерный в
полосе (Fнс; Fвс): Gr(f) = А. Тогда, поскольку 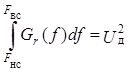 ,
получим
,
получим  .
.
После интегратора (предыскажающего контура) 1 искаженный сигнал rи(t) имеет спектр Gд(f) = Gr(f)K2пp= A/(2πf)2.Соответственно энергетический спектр скорости Sи(t) сигнала rи(t) равен, как показано ранее, Gs.и(f) = Gr.и(f)(2πf)2 = А. Тогда дисперсия и максимальное значение скорости этого сигнала равны:
 .
.
Используя условие перегрузки для сильного сигнала Sпик.и.бТт≤ ∆ и подставляя его в формулу для ξд2, получим выражение для ОСШК, которое совпадает с (14.28). Таким образом, ДСМ для сигнала с равномерным спектром имеет такие же показатели, как и классическая ДМ, но проще в реализации. Для реальных сигналов ДСМ обеспечивает выигрыш ОСШК порядка 2—3 дБ.
Значительно больший эффект достигается за счет компрессии динамического диапазона. Многочисленные варианты такой компрессии можно классифицировать по двум основным признакам:
1) по какому сигналу — аналоговому или цифровому — осуществляется управление компрессией;
2) по скорости управления компрессором — инерционное (сравнительно медленное) или мгновенное.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.