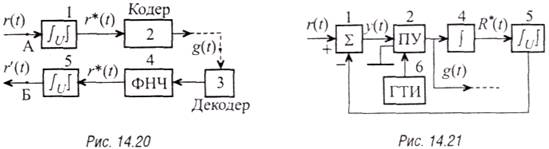
Простейший вариант адаптивной ДМ с инерционной компрессией (рис. 14.20) реализуется за счет введения на передающей стороне компрессора 7, а на приемной — экспандера 5. Основные блоки — кодер 2, декодер 3 и ФНЧ 4 — образуют классическую (линейную) систему ДМ. Аналоговые компрессор 1 и экспандер 5 (совместно — компандер) собраны по типовым схемам (см. параграф 9.6) с инерционным (слоговым) управлением по аналоговому компрессированному сигналу r*(t). Необходимость обеспечения равномерной сквозной амплитудной характеристики системы (между точками А и Б на рис. 14.20) не позволяет выполнить компрессию сигнала в широких пределах (сложно создать блоки 1 и 5 со взаимно обратными характеристиками), поэтому существенно улучшить показатели АДМ для этого варианта не удается.
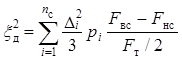
Значительно проще обеспечить глубокую компрессию динамического диапазона, если нелинейный кодер (совокупность блоков 1 и 2 на рис. 14.20) реализовать по схеме «кодер с нелинейным декодером (совокупность блоков 3, 4, 5 на рис. 14.20) в цепи обратной связи» (рис. 14.21). Здесь на стороне передачи и приема используют однотипный экспандер 5, остальные блоки пояснялись ранее. Экспандер управляется аналоговым квантованным сигналом R*(t) по типовой схеме инерционного управления (см. параграф 9.6).
Более высокие качественные показатели обеспечивают варианты АДМ с управлением по цифровому сигналу g(t). Если кодер и декодер ДМ выполнены на основе цифровой схемотехники (рис. 14.22), то компрессию можно обеспечить с помощью нелинейного цифрового преобразователя (НЦП), имеющего кусочно-линейную характеристику экспандирования (см. подпараграф 13.3.4). Здесь цифровой сигнат кодера g(t), представляющий собой последовательность символов 0 и 1. поступает на вход реверсивного счетчика (PC) 4. При поступлении символа 1 число, записанное в PC, увеличивается на единицу, при поступлении 0 — уменьшается на 1. Следовательно, PC выполняет функцию цифрового интегратора. На его выходе образуется q-разрядное число в параллельном коде, которое поступает в НЦП 5. С выхода НЦП р-разрядное число (р > q) подается в ЦАП (блок эталонов) 6, где формируется квантованный сигнал предсказания Uпр(t) = R(t), который поступает в аналоговую схему вычитания 1. Декодер системы состоит из аналогичных блоков 7—9. Назначение генераторов тактовых импульсов 3 и 10, порогового устройства 2 и ФНЧ 11 не требует пояснений.

Процесс слежения в такой адаптивной системе отличается тем, что изменение цифрового сигнала g(t) на единицу вызывает изменение предсказанного сигнала R(t) на величину ∆R, которая меняется в зависимости от текущего значения R(t):величина ∆R максимальна, когда R(t) находится в пределах старшего сегмента характеристики НЦП (см. рис. 13.55), и ∆R минимальна, когда R(t) соответствует младшему сегменту. Другими словами, в такой системе слежение осуществляется с разным шагом ∆i. По аналогии с материалом параграфа 13.4 дисперсия шумов квантования будет равна
 ,
(14.31)
,
(14.31)
где pi — вероятность попадания мгновенного значения
сигнала R(t) в интервал
[Ui–1;Ui]i-го сегмента; i ![]() [1, пс]; пс — число
сегментов характеристики НЦП; ∆i — шаг слежения в пределах i-го
сегмента.
[1, пс]; пс — число
сегментов характеристики НЦП; ∆i — шаг слежения в пределах i-го
сегмента.
Для кусочно-линейных законов компрессии имеем:
A-закон: ∆1 = ∆2 =  ; ∆i= ∆22i-2, 2 ≤ i ≤ nc;
; ∆i= ∆22i-2, 2 ≤ i ≤ nc;
μ-закон: ∆1= ; ∆i =
∆12i-1, 1 ≤ i ≤ nc;
; ∆i =
∆12i-1, 1 ≤ i ≤ nc;
где Nc— число шагов в пределах сегмента; Uм — максимальное значение шкалы квантования ЦАП, включенного на выходе НЦП (см. рис. 14.22).
При этом самый большой шаг квантования ∆mах (для i = nс) отличается от самого малого ∆min (i = 1) соответственно в 2nс–2 или 2nc–1 раз. Значения рi для речеподобного сигнала с действующим значением Uд определяются из (13.31). Если плотность распределения сигнала соответствует нормальному закону, то можно использовать выражения (14.19)—(14.21), приняв Zi = Ui/Uд, Zпик.б = Uпик.д/Uд. Пороговое значение характеристики НЦП соответствует пиковому напряжению самого сильного абонента Uпик.б = Uм,чтобы не было шумов ограничения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.