В зависимости от
времени проведения анализа различают системы АДМ с инерционным (ДМИК) и
мгновенным (ДММК) компандированием. В системах ДМИК, применяемых для передачи
речевых сообщений, шаг квантования ∆(t)
(рис. 14.25, 6) изменяется с частотой слогов речи (рис. 14.25, а),
которая составляет 10—40 Гц. По аналогии с аналоговыми компандерами (см.
параграф 9.6) такое компандирование 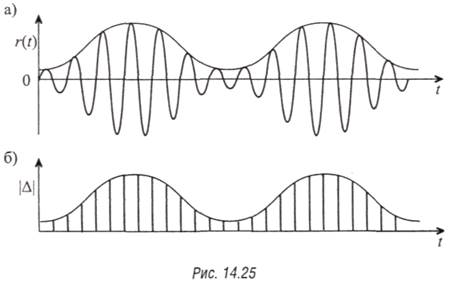 называется слоговым. Как следует из рис.
14.25, амплитуда (не полярность!) импульса тактовой частоты на выходе
модулятора в течение периода колебаний входного сигнала r(t) остается практически постоянной и медленно изменяется с частотой
слогов. В системах ДММК шаг квантования «отслеживает» изменение мгновенного
значениясигнала r(t). На рис. 14.26, а приведены примерные осциллограммы входного
r(t) и предсказанного R(t) сигналов (соответственно кривые 1 и 2) при
изменении шага квантования ∆(t) и
цифрового сигнала g(t), показанных на рис. 14.26, б, в.Схема управления в системах ДМИК в принципе может строиться как типовой
декодер ДМ (см. рис. 14.12, в), к которому добавляют амплитудный
детектор и ФНЧ с частотой среза порядка 10—40Гц. Однако на практике обычно
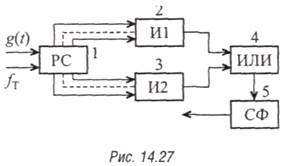
применяют более простую схему СУ, показанную на рис. 14.27. Она основана на
использовании того обстоятельства, что в цифровом сигнале g(t) с увеличением амплитуды и (или) частоты входного сиг нала растет
число пачек импульсов одного знака, а также число импульсов в пачке за единицу
времени (ср. рис. 14.12, б и 14.14, б). С помощью k-разрядного реверсивного счетчика (PC) 1, двух схем «И» (И1 и И2) и схемы «ИЛИ» 4
«обнаруживают» пачки импульсов одного знака (+1 с прямого или –1 с инверсного выхода PC), в
которых
называется слоговым. Как следует из рис.
14.25, амплитуда (не полярность!) импульса тактовой частоты на выходе
модулятора в течение периода колебаний входного сигнала r(t) остается практически постоянной и медленно изменяется с частотой
слогов. В системах ДММК шаг квантования «отслеживает» изменение мгновенного
значениясигнала r(t). На рис. 14.26, а приведены примерные осциллограммы входного
r(t) и предсказанного R(t) сигналов (соответственно кривые 1 и 2) при
изменении шага квантования ∆(t) и
цифрового сигнала g(t), показанных на рис. 14.26, б, в.Схема управления в системах ДМИК в принципе может строиться как типовой
декодер ДМ (см. рис. 14.12, в), к которому добавляют амплитудный
детектор и ФНЧ с частотой среза порядка 10—40Гц. Однако на практике обычно
применяют более простую схему СУ, показанную на рис. 14.27. Она основана на
использовании того обстоятельства, что в цифровом сигнале g(t) с увеличением амплитуды и (или) частоты входного сиг нала растет
число пачек импульсов одного знака, а также число импульсов в пачке за единицу
времени (ср. рис. 14.12, б и 14.14, б). С помощью k-разрядного реверсивного счетчика (PC) 1, двух схем «И» (И1 и И2) и схемы «ИЛИ» 4
«обнаруживают» пачки импульсов одного знака (+1 с прямого или –1 с инверсного выхода PC), в
которых  число
импульсов больше или равно k.
Далее
последовательность обнаруженных импульсов пропускается через слоговый фильтр
(СФ) 5, который выделяет огибающую. Можно показать, что она совпадает по форме
со слоговой огибающей от производной сигнала
S(t) = dr(t)/dt и имеет примерный вид, как на рис. 14.25, а.
Типовым является значение k =
3—6.
число
импульсов больше или равно k.
Далее
последовательность обнаруженных импульсов пропускается через слоговый фильтр
(СФ) 5, который выделяет огибающую. Можно показать, что она совпадает по форме
со слоговой огибающей от производной сигнала
S(t) = dr(t)/dt и имеет примерный вид, как на рис. 14.25, а.
Типовым является значение k =
3—6.
При мгновенном компандировании схема управления также содержит анализатор числа импульсов в пачке типа реверсивного счетчика, но последующий алгоритм аначиза несколько другой. Здесь величина шага квантования ∆i, на i-м шаге зависит от положения i-го импульса в пачке, т.е. от предыстории процесса g(t). Эта связь выражается, например, правилом:
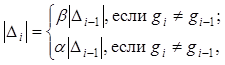
причем αβ ≈ 1; β > 1 и 0 < α < 1.
Обычно α ≈ 0,5, β ≈ 2; следовательно, каждый следующий импульс в пачке вызывает двукратное изменение шага квантования по сравнению с предыдущим. При таких значениях β и α изменение шага удобно производить с помощью матрицы R — 2R (см. подпараграф 13.2.2).
Качественные показатели систем ДМ с командированием зависят от диапазона изменения шага квантования d = 201g(∆max/∆min). Если динамический диапазон сигнала (от «сильного» до «слабого» абонентов) D = 201g(Uд.б/Uд.н?) таков, что d ≥ D, то для системы ДМИК расчет ОСШК ведется по (14.28), (14.29) при условии Uд = Uд.б, а для ДММК — по (14.33), (14.34). Если d < D, то для ДМИК полученный выше результат для «слабого» абонента надо уменьшить на величину (D — d), дБ. При выборе системы компандирования следует учитывать, что система ДММК имеет высокую скорость отслеживания (это особенно важно, например, при передаче ТВ сигналов), она успешно реализуется на цифровой схемотехнике, но обладает пониженной помехоустойчивостью при сбоях символов в цифровом ДМ сигнале. Система ДМИК более защищена от помех в цифровом канале, но сложнее в реализации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.