Московский государственный технический университет имени Н.Э. Баумана
|
Учебное пособие ВЛ. Иванов, МЛ. Голованов Теория дискретных систем автоматического управления Часть rv Нелинейные системы
|
|
Издательство МГТУ имени Н.Э. Баумана |
Московский государственный технический университет им. Н.Э. Баумана
В.А. Иванов, М.Ае Голованов
Теория дискретных систем автоматического управления
Часть IV
Рекомендовано редсоветом МГТУ им. Н.Э. Баумана в качестве учебного пособия
Москва
Издательство МГГУ им. Н.Э. Баумана
2003 ![]()
удк 65.011.56 (075.8) БЖ 32.815
Рецензенты: ЮМ. Астапов, Ю. В. ПоДуриев
Иванов В,А., Голованов МА.
ид) Геория дискретных систем автоматического управления: Учеб- пособие, Ч. IV: Нелинейные системы: — М.: Изд-во РИГГУ им- П Баумана, 2003. — 56 с.: ил.
lSllN ![]() О
О
В учебном методы анализа нелинейных дискретных автомал ическп.ч н--м Рассмотрены метод фазовой плоскости, исследование .щпск•рс [ПЫХ систем с помотцью прямого метода
ДИСК Ре СИСЛГМ
п 1 га ППфРOНЫ,Ч атома 1 иче.ских систем». Ил р •l iinan удк 65.011.56 (075.8)
ББК 32.815
![]()
ISBN 5-7038-2308-0 М! У им. Н.Э. Баумана, 2003
1.1. Основные понятия и определения
Рассмотрим автономную систему разностных уравнений д-Х1 [П] = Л (Ч Х2 [П] д.Х2 [П] = f2(X1 [П], Х2 [П]
(1.1)
Ахк [п] = fk („Ч X2[nl,
Систему (1.1)
можно записать в векторном виде дх[п]![]()
где
дх[п]
=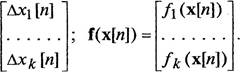 (1.2)
(1.2)
Полагаем, что правые части системы
уравнений (1.1) непрерывны, ограничены и однозначны в выпуклой области G
К-мерного пространства Х. Это обеспечивает существование и единственность
решения системы уравнений (1.1)![]()
Решения автономной системы (1.1) обладают следующим важным свойством: если имеется некоторое решение Xi (i 1,2,..., К) системы (1.1), то функции Xi
(i - 1,2, К) , где I = const, также представляют собой решение системы (1.1).
В самом деле, так как Xi = [п] (i =
1,2,..., К) — решение системы (1.1), то имеют место тождества [п] = [п], Ц2[п]![]()
(i - 1 2 К). Заменив в этих тождествах п на п + 1, получим
+1], а [п + 11) (i 1,2 К). но
Ц [п + 1] + + 1] — + 1] = Ei[n + 1] — Ei[nl = дЧ[п]. Тогда
Е2[п], (1.3)
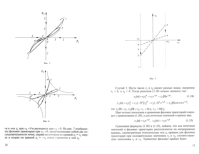
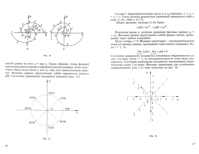
Дадим геометрическую интерпретацию
решений автономной системы. Рассмотрим К-мерное пространство Х с кординатами ![]() хк.
Пусть .Xi = % [п] (i= 1,2,..., К) — некоторое решение системы (1.1). Каждому
фиксированному значению п соответствует точка в пространстве Х, называемая
изображающей точкой. При изменении п от —сп до оо изображающая точка пробегает
последовательность дискретных точек, образующих фазовую траекторию.
хк.
Пусть .Xi = % [п] (i= 1,2,..., К) — некоторое решение системы (1.1). Каждому
фиксированному значению п соответствует точка в пространстве Х, называемая
изображающей точкой. При изменении п от —сп до оо изображающая точка пробегает
последовательность дискретных точек, образующих фазовую траекторию.
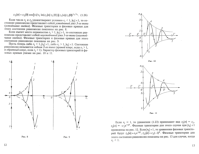
Пространство Хназывается фазовым ![]() Можно
показать, что различным решениям системы ( I 1)фазовые траектории, которые либо
не имеют общих либо совпадают.
Можно
показать, что различным решениям системы ( I 1)фазовые траектории, которые либо
не имеют общих либо совпадают.
Назовем состоянием равновесия системы разносл пых уравнений (1.1) фазовую траекторию, соответствующую решению
Состояние равновесия представляет собой решение системы уравнений
 (1.5)
(1.5)
полученных из системы (1 1 ) путем ![]() Н
УЛ ю ЛСВЫХ частей.
Н
УЛ ю ЛСВЫХ частей.
В самом деле, если![]()
(i ![]() К),
[1 система уравнений (1 1) принимает вид (1.5).
К),
[1 система уравнений (1 1) принимает вид (1.5).
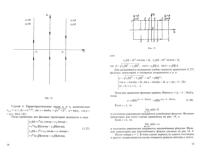
1.2. СОСтОЯния равновесия системы линейных разностных уравнений
второго порядка
Рассмотрим автономную систему разностных уравнений второго порядка
![]() (1.6)
(1.6)
![]() Пусть Xi[nl = ај (i = 1,2) — некоторое состояние
равновесия системы (1.6). Для исследования поведения фазовых траекторий в
некоторой окрестности состояния равновесия составим уравнения для отклонений.
Для этого перейдем к переменным и [п]
Пусть Xi[nl = ај (i = 1,2) — некоторое состояние
равновесия системы (1.6). Для исследования поведения фазовых траекторий в
некоторой окрестности состояния равновесия составим уравнения для отклонений.
Для этого перейдем к переменным и [п] ![]()
![]() а1
и Y2[nl = Х2[п] 02. Учитывая, что дул [п] = д.Х1 [п], Дк [п] = дх2[п], получим
следующую систему уравнений для отклонений:
а1
и Y2[nl = Х2[п] 02. Учитывая, что дул [п] = д.Х1 [п], Дк [п] = дх2[п], получим
следующую систему уравнений для отклонений:
![]()
Разложим правые части этих уравнений в ряд Тейлора в окрестности состояния равновесия (щ 02) и 0l рапичИМСЯ линейными членами разложения. Для состояния равновесия справедливы ра4
венстваЛ(аг, ) = 0, f2(a1, а2 ) = 0, поэтому получим следующую систему линейного приближения для отклонений от состояния равновесия:
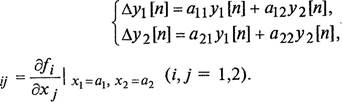 (1.7)
(1.7)
где а
Систему разностных уравнений (1.7) запишем в векторном виде ду[п] = Ау[п], (1.8)
![]() где ду[п] —y[nl =
где ду[п] —y[nl =
0 21 а п
Система уравнений линейного приближения справедлива в некоторой малой окрестности состояния равновесия. Однако известны случаи, когда система линейных разностных уравнений вида (1.7) описывает динамику дискретной автоматической системы. Поэтому исследование фазовых траекторий линейной системы второго порядка имеет и самостоятельное значение.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.