![]()
где Ко — коэффициент усиления; р = —; 7'l — постоянная времени звена.
Ей соответствует частотная характеристика линейной дискретной системы
![]()
нелинейность описывается релейной характеристикой Q(6) = sign о.
Качественный вид частотных характеристик W(jo) и ![]() показан на рис. 34.
показан на рис. 34.
Согласно (З. 19), выражения для коэффициента гармонической линеаризации нелинейного импульсного элемента типа идеального реле имеют следующий вид:
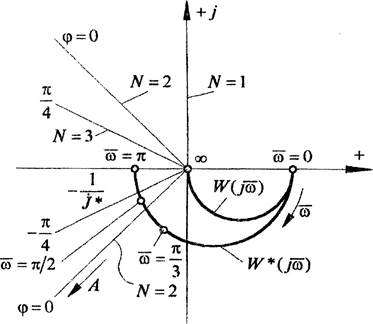
Рис. 34
51
для четных лт

sin — лт 2
![]() для нечетных лт
для нечетных лт ![]() е—Јр
.
е—Јр
.
АЛГ . п sm![]()
![]() Найдем возможные решения уравнения гармонического баланса
системы в форме (3.21). Для этого на плоскости частотных характеристик (см.
рис. 34) изобразим семейство графиков для различных лк.
Найдем возможные решения уравнения гармонического баланса
системы в форме (3.21). Для этого на плоскости частотных характеристик (см.
рис. 34) изобразим семейство графиков для различных лк.
1
![]()
и, как следует из рис. 34, такой режим в рассматриваемой системе возникает всегда.
В ситуации, представленной на ис. 34, в соответствующий сектор попадает еще точка ид у— частотной характеристики 2
И7 (Д). Это означает, что в системе существует устойчивый периодический режим с полупериодом лт = 2-
Других периодических режимов с большим полупериодом лт
данная система не имеет.
Метод гармонической линеаризации для дискретных систем с ![]() использованием
логарифмических частотных характеристик (ЛМ) аналогичен соответствующему методу
для непрерывных систем. Задача сводится к решению следующих уравнений,
полученных из (3.20):
использованием
логарифмических частотных характеристик (ЛМ) аналогичен соответствующему методу
для непрерывных систем. Задача сводится к решению следующих уравнений,
полученных из (3.20):
![]() (Р,
ЛЭ =LmWv7 j—tg—
(Р,
ЛЭ =LmWv7 j—tg—
и
![]() J—tg——
J—tg——
![]()
52
|
20 |
|
|
|
lga 10 |
|
|
(Р)
 -1
-1
Рис. 35
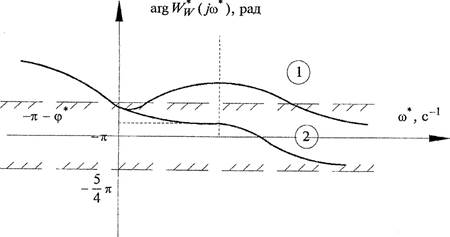
В качестве примера определим методом ЛЧХ автоколебания, соответствующие лк = 2 в дискретной системе с заданными логарифмическими амплитудными частотными характеристиками и логарифмическими фазовыми частотными характеристиками (см. рис. 34). Нелинейный элемент имеет релейную характеристику (см. рис. 32), То с.
![]() 2,
=201g
2,
=201g![]()
53
![]()
4
— Л л 2 л 2-1
Значению =
— соответствует 00* = ——tg![]()
2 то 2N то
Если при этой частоте фазочастотная характеристика (Р(о) = = argW (јо) не заходит в заштрихованную область (кривая 1 на рис. 35), то автоколебаний при N= 2 нет; в противном случае из графиков (Д 2, ф) можно найти амплитуду и фазу (Р автоколебаний.
Список литературы
1. Математические основы аавтоматического регулирования. В 2 т. Т. 1, 2 [Иванов ВЛ., Медведев ВС., Чемоданов БК. , Ющенко АС. М.: Высш. шк., 1977.
2. Попов Е.П. Теория нелинейных систем автоматического ре-
![]()
гулирования и управления. М.: Наука, 1979.
З. Цыпкин ЯЗ, Попков Ю. С. Теория нелинейных импульсных систем. М.: Наука, 1973.
4. Шамриков ЛМ. Основы теории цифровых систем управления: Учебник для высших технических учебных заведений. М.: Машиностроение, 1985.
Оглавление
1. Метод фазовой плоскости![]()
1.1.
Основные понятия и
определения.![]()
1.2. Состояния равновесия системы линейных разностных уравнений второго порядка 4 2. Анализ устойчивости нелинейных дискретных систем 23
201. Основные понятия и определения 23
2.2. Теоремы Ляпунова об устойчивости и неустойчивости 24
2.3. Исследование устойкшвости по уравнениям линейного приближения 27
2.4. Геометрический критерий абсолютной устойчивости
,щскретных систем![]() 31 З. Метод гармонической линеаризации
в теории дискретных систем
31 З. Метод гармонической линеаризации
в теории дискретных систем![]() 40
40
3.1. Коэффициенты гармонической линеаризации![]() 42
42
3.2. Определение параметров периодических решений![]() 47 Список литературы. 54
47 Список литературы. 54
Виктор Александрович Иванов
Михаил Алексеевич Голованов
ТЕОРИЯ ДИСКРЕТНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Часть IV
Нелинейные системы
![]() Редактор ОМ. Королева
Редактор ОМ. Королева
Корректор Л,И. Малютина
Подписано в печать 14.05.03. Формат 60х84/16. Бумага офсетная. Печ. л. 3,5. Усл. печ. л. 3,25. Уч.-изд. л. 3,15. Тираж 100 экз. Изд. № 82. Заказ“
![]() Издательство МГЛУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская, 5.
Издательство МГЛУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская, 5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
