Если = 1, то уравнения (1.23) принимают вид q[nl — Ср
Z2[nl = —С2е Т2П Фазовые траектории для этого случая при < 1
приведены на рис. 12. Если t2l = 1, то уравнения фазовых траекторий будут [п] =
сте ТР , Z2[nl ![]() Фазовые траектории для этого
состояния равновесия показаны на рис. 13 для случая; когда
Фазовые траектории для этого
состояния равновесия показаны на рис. 13 для случая; когда
13
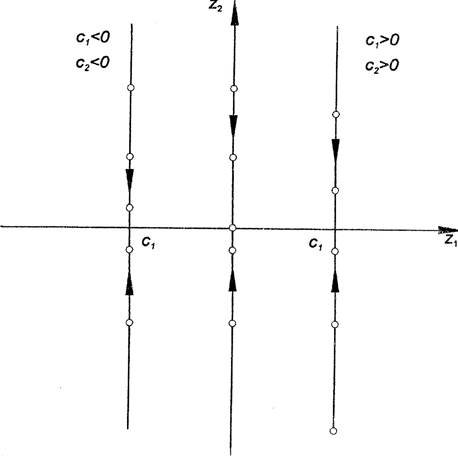
Рис. 12
Случай 4. Характеристические числа r и
комплексные: ![]() ,
где у = — а 2 + р 2 , 0 =argn, COSQ =
,
где у = — а 2 + р 2 , 0 =argn, COSQ =
— ос/у, sin(P = Му .
Тогда уравнения для фазовых траекторий запишутся в виде
[п] = уп (q cosnq) + c2 sinnqo) =
(1.27)
= уп (Z 2 [0] cosnq + [01 sinno),
14
или
[п] = Аул cos (тр + б), Z2[n] = Ау п + б), где А = Zl [012 + Z2[012 cos = [О]/А, sin6 = (2 [О]/А.
Для дальнейшего изложения удобно записать уравнения (1.27) фазовых траекторий в полярных координатах р и у:
 = Ау п
= Ау п
![]() siny = sin(mp + б), = тр + 6+ 2Кп
siny = sin(mp + б), = тр + 6+ 2Кп
Получим уравнение фазовых кривых. Имеем п = (у — 6 — 2Кл)Вр, тогда
![]() (1.28)
(1.28)
Если у то lim р[п] = О, и состояние равновесия называется устойчивым фокусом. Фазовые траектории для этого случая приведены на рис. 14, а.
![]()
Если у то lim р[п] = 00,
00
и состояние равновесия называется неустойчивым фокусом. Фазовые траектории для неустойчивого фокуса указаны на рис 14, б.
![]() Пусть
теперь у = 1. В этом случае переход из одного состояния в другое осуществляется
путем поворота радиуса-вектора р посто15
Пусть
теперь у = 1. В этом случае переход из одного состояния в другое осуществляется
путем поворота радиуса-вектора р посто15
Рис. 14
янной длины на угол (Р = arg Таким образом, точки фазовой траектории расположены в вершинах многоугольника. Если существует такое целое число l, что ф = 2Кп, этот многоугольник замкнут. Фазовые кривые представляют собой окружности радиуса р[0]. Состояние равновесия называется вершиной (рис. 15).
16
Случай 5. Характеристические числа и r2 совпадают, т. е. — — r. Тогда система разностных уравнений приводится либо к виду (1.16), либо к (1.17).
Общее решение системы (1.16) будет:
Zl[nl![]()
Исключив время п, получим уравнение
фазовых кривых ф ![]()
![]() cq.
Фазовые кривые представляют собой прямые линии, проходящие через начало
координат.
cq.
Фазовые кривые представляют собой прямые линии, проходящие через начало
координат.
Пусть теперь r > 0. Фазовые траектории
— последовательности точек на прямых линиях, проходящих через начало координат.
Если r< 1, то lim [п] = lim Z2[n]![]()
П ОО П 00
Состояние равновесия называется устойчивым Декритическим узлом 1-го типа. Если r > 1, то последовательности точек будут расходиться. Состояние равновесия называется неустойчивым Декритическим узлом 1-го типа. Фазовые траектории для устойчивого декритического узла 1-го типа показаны на рис. 16.
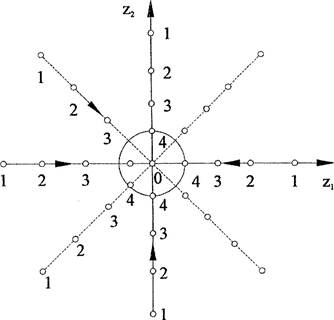
Рис. 16
17
Если r < О, то решение (1.19) можно
записать в виде q[nl — = ![]() rln,
Z2[nl =
rln,
Z2[nl = ![]() r
р. Фазовые траектории, как и в предыдущем случае, представляют собой
последовательности точек, расположенных на прямых линиях, проходящих через
начало координат. Состояние равновесия называется устойчивым декритическим
узлом 2-го типа, если r > —1, и неустойчивым Декритичесим узлом 2-го типа,
если r < —1. Фазовые траектории для устойчивого декритического узла 2-го
типа показаны на рис. 17.
r
р. Фазовые траектории, как и в предыдущем случае, представляют собой
последовательности точек, расположенных на прямых линиях, проходящих через
начало координат. Состояние равновесия называется устойчивым декритическим
узлом 2-го типа, если r > —1, и неустойчивым Декритичесим узлом 2-го типа,
если r < —1. Фазовые траектории для устойчивого декритического узла 2-го
типа показаны на рис. 17. ![]()
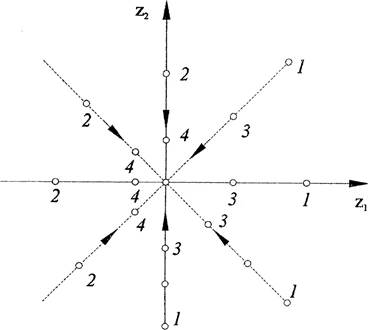
Рис. 17
Пусть теперь исходная система уравнений приведена к виду
(1.17). Ее общее решение, согласно (1.20), будет [п] = ![]() +
, Z2[n] =С2Р
+
, Z2[n] =С2Р![]()
Если r > О, то общее решение (1.20) можно записать так:
ч [п] = е ТП + 9.211 , Z2[nl =С2етп
![]()
где т = lnr. Исключив время п, получим уравнение фазовых кривых
![]() 52
+ ——ln
52
+ ——ln
18
При 1' lim [п] = lim Z2[nl![]()
П 00
Состояние равновесия называется устойчивым вырожденным узлом 1-го типа, При r > 1 состояние равновесия представляет собой неустойчивый вырожденный узел 1-го типа. Фазовые траектории для устойчивого и неустойчивого вырожденных узлов 1-го типа показаны на рис. 18.
Если r < 0, то решение (1.20) можно записать в виде
![]() [п] |rln +
9.2-n , Z2[n]
[п] |rln +
9.2-n , Z2[n]![]()
или
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.