Задание на равновесие плоской системы сил состоит из трех расчетных работ: двух №1 и №2 ¾ на равновесие одного тела под действием плоской произвольной системы сил; и №3 ¾ на равновесие системы сочлененных тел.
3.1. Равновесие одного тела
Задача на равновесие одного тела под действием плоской произвольной системы сил решается в следующей последовательности:
- выделить тело, равновесие которого рассматривается;
- указать заданные активные силы, приложенные к телу;
- в случае несвободного тела мысленно освобождаем тело от связей, заменив их действием реакций связей (направление которых выбирается исходя из вида связи (табл.2.1);
- составить расчетную схему, указав на ней (на рисунке схемы конструкции) все приложенные к телу активные силы, моменты и реакции связей, распределенные нагрузки замещаются при этом сосредоточенными силами с указанием точек их приложения;
- определить число неизвестных реакций и число возможных уравнений равновесия и установить, является ли рассматриваемая задача статически определимой;
- выбрать систему координат и составить уравнения равновесия;
- решить систему уравнений и определить все неизвестные величины;
- провести качественный анализ полученного решения и его соответствия механическим условиям задачи.
Задачу на равновесие плоской системы сил, приложенной к одному телу, рассматриваем для двух случаев:
Расчетная работа №1. Равновесие тела, которое может опрокидываться;
Расчетная работа №2. Равновесие плоской произвольно расположенной системы сил.
РАСЧЕТНАЯ РАБОТА №1
Равновесие тела, которое может опрокидываться
При выполнении расчетной работы №1 на опрокидывание рассматривается предельное положение, когда тело находится в состоянии неустойчивого равновесия и может перейти из состояния покоя в движение. Всякое даже незначительное изменение элементов конструкции или сил, действующих на тело, ведет к опрокидыванию (вращению) конструкции вокруг некоторой оси, называемой осью опрокидывания. Некоторые активные силы, приложенные к телу, образуют пары, которые стремятся опрокинуть тело. Сумма моментов таких сил относительно оси опрокидывания называется моментом опрокидывания; другая часть активных сил создает пары, которые стремятся возвратить тело в исходное положение. Сумма моментов этих сил относительно оси опрокидывания называется моментом устойчивости.
Определить:* вес противовеса ![]() ,
при котором не произойдет опрокидывание ненагруженного крана;*максимальный вес
,
при котором не произойдет опрокидывание ненагруженного крана;*максимальный вес ![]() груза,
который сможет поднять кран; *реакции
в опорах крана
груза,
который сможет поднять кран; *реакции
в опорах крана ![]() при максимальной нагрузке.
при максимальной нагрузке.
Схемы конструкций механических кранов представлены на рис.3.1, а
исходные данные: веса ![]() кранов, положение центра тяжести C
и линейные размеры - в табл 3.1.
кранов, положение центра тяжести C
и линейные размеры - в табл 3.1.
Элементы конструкции принимаются абсолютно жесткими, стержневые детали - сплошными и невесомыми, трение в шарнирах и опорах отсутствует.
Пример 3.1 выполнения расчетной работы №1. Равновесие плоской произвольной системы сил, приложенной к одному телу, которое может опрокидываться.
Дано: Механический кран
(рис.3.2) веса ![]() установлен на горизонтальной
поверхности. Расстояние между опорами
установлен на горизонтальной
поверхности. Расстояние между опорами ![]() ,
абсцисса центра тяжести крана
,
абсцисса центра тяжести крана ![]() , вылет стрелы крана
относительно опоры
, вылет стрелы крана
относительно опоры ![]() ,
,
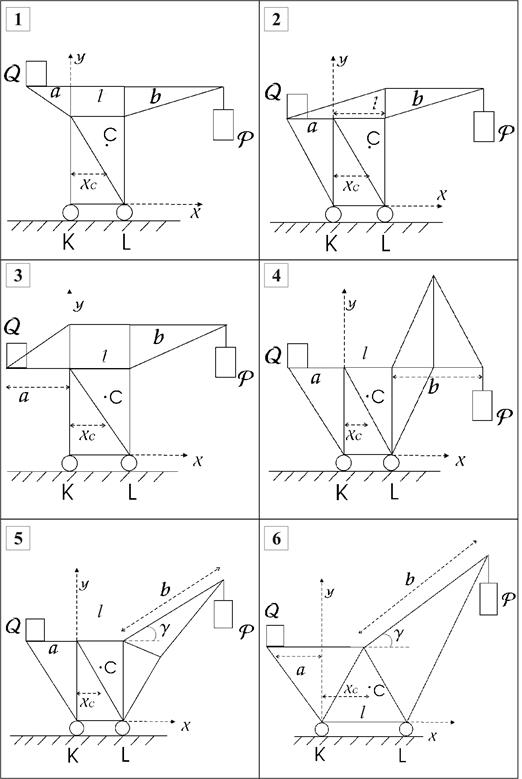
Рис. 3.1. Схемы конструкций механических кранов к расчетной работе № 1
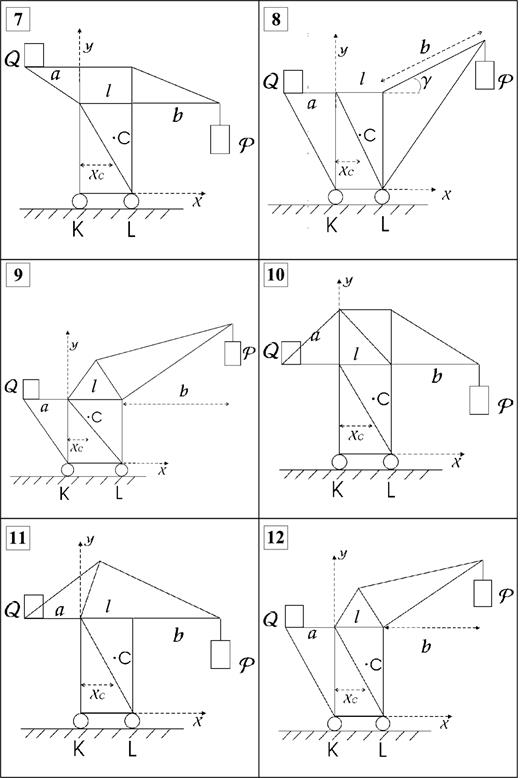
Рис. 3.1 (продолжение)
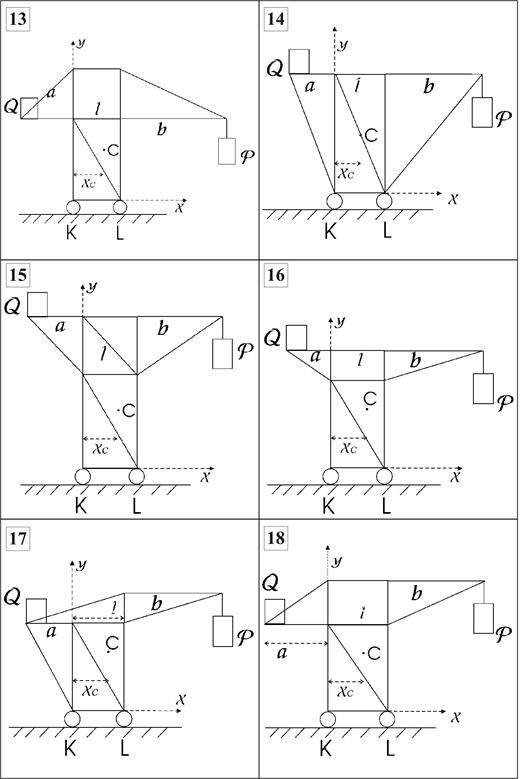
Рис. 3.1 (окончание)
Т а б л и ц а 3.1
Исходные данные к расчетной работе №1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.