Вариант 4. ПанельABC весом ![]() удерживается в положении равновесия под
углом
удерживается в положении равновесия под
углом ![]() к вертикали петлями A и B и посредством каната CD,
прикрепленного к панели в точке С, проходящего через блок D и удерживаемого
цилиндрическим грузом веса G. Пренебрегая трением,
используя компьютерное программное обеспечение, вычислить и построить график изменения
величины веса груза G, соответствующей условию
равновесия плиты, как функции
к вертикали петлями A и B и посредством каната CD,
прикрепленного к панели в точке С, проходящего через блок D и удерживаемого
цилиндрическим грузом веса G. Пренебрегая трением,
используя компьютерное программное обеспечение, вычислить и построить график изменения
величины веса груза G, соответствующей условию
равновесия плиты, как функции ![]() , т.е.
, т.е. ![]() при изменении угла
при изменении угла ![]() в пределах
в пределах ![]() Определить
величину угла
Определить
величину угла ![]() , соответствующую равновесию
системы, когда
, соответствующую равновесию
системы, когда
G =0.09 кH.
Вариант 5. Однородная стальная плитаABCD, весом G, приварена к
валу EF, и удерживается в указанном на рисунке
положении ![]() моментом пары
моментом пары![]() . Учитывая, что подшипники предотвращают
скольжение вала вдоль EF и
что вал лежит в плоскости
. Учитывая, что подшипники предотвращают
скольжение вала вдоль EF и
что вал лежит в плоскости ![]() построить
график изменения величины момента пары
построить
график изменения величины момента пары ![]() в
функции угла поворота
в
функции угла поворота ![]() , т.е.
, т.е. ![]() при изменении угла
при изменении угла ![]() в пределах
в пределах ![]()
Вариант 6. В представленном на рисунке механизме
положение стрелы AC управляется
стержнем BD. Для заданной силы ![]() вычислить реакцию в шарнире A и момент пары
вычислить реакцию в шарнире A и момент пары ![]() , удерживающие систему в положении равновесия,
и графически построить зависимости: реакции в шарнире A ¾
, удерживающие систему в положении равновесия,
и графически построить зависимости: реакции в шарнире A ¾![]() и момента пары
и момента пары ![]() в функции угла поворота
в функции угла поворота ![]() , т.е.
, т.е. ![]() и
и
![]() при изменении угла
при изменении угла ![]() в пределах
в пределах ![]() Определить
также a) величину угла
Определить
также a) величину угла![]() , при котором момент пары достигает
максимальной величины, т.е.
, при котором момент пары достигает
максимальной величины, т.е. ![]() ; b) величину угла
; b) величину угла![]() ,
при котором реакция в шарнире A достигает
максимальной величины, т.е.
,
при котором реакция в шарнире A достигает
максимальной величины, т.е. ![]() .
.
Вариант 7. Ферма ABC, состоящая из трех невесомых стержней, закреплена в
точке A цилиндрическим
шарниром, а точке С ¾ цилиндрическим
шарниром на катках. Определить усилия в стержнях, вызываемые силой ![]() , и отобразить графически изменения этих
усилий для каждого стержня при изменении параметра
, и отобразить графически изменения этих
усилий для каждого стержня при изменении параметра ![]() в
следующем диапазоне:
в
следующем диапазоне: ![]() .
.
Вариант 8. Стержень CD прикреплен к втулке
D и проходит через втулку, приваренную к концу B рычага AB.
Принимая за начальное положение рычага AB, указанное на рисунке при ![]() =15°, используя программное обеспечение, рассчитать
и построить зависимость величины момента пары М, необходимого для равновесия
системы при действии силы
=15°, используя программное обеспечение, рассчитать
и построить зависимость величины момента пары М, необходимого для равновесия
системы при действии силы ![]() как функции
угла поворота
как функции
угла поворота ![]() для 15 ° £
для 15 ° £![]() £ 90 °. Определить угол
£ 90 °. Определить угол ![]() , при котором величина момента М будет минимальной.
, при котором величина момента М будет минимальной.
Вариант 9.
Однородная круглая пластина радиуса R
и веса ![]() поддерживается тремя
вертикальными проволоками, которые располагаются на одинаковом расстоянии
друг от друга по краю пластины. Груз Е веса
поддерживается тремя
вертикальными проволоками, которые располагаются на одинаковом расстоянии
друг от друга по краю пластины. Груз Е веса ![]() =0.03
кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра
CD, пока не достигает точки C. Графически построить
зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза
Е от точки D; определить
значение a, при котором силы натяжения проволок A и C являются
минимальными.
=0.03
кН помещен на пластину в точку D и от нее начинает медленно двигаться вдоль диаметра
CD, пока не достигает точки C. Графически построить
зависимость сил натяжения проволок A и C в функции перемещения a, где a - расстояние груза
Е от точки D; определить
значение a, при котором силы натяжения проволок A и C являются
минимальными.
Вариант 10. Груз массой m, подвешенный к тросу, удерживается пружиной AB жесткостью с. Длина недеформированной пружины соответствует положению механизма, когда угол q = 0. Зная, что жесткость пружины с =1 кН/ м, используя вычислительное программное обеспечение, а) вычислить и графически построить функциональную зависимость массы груза m,
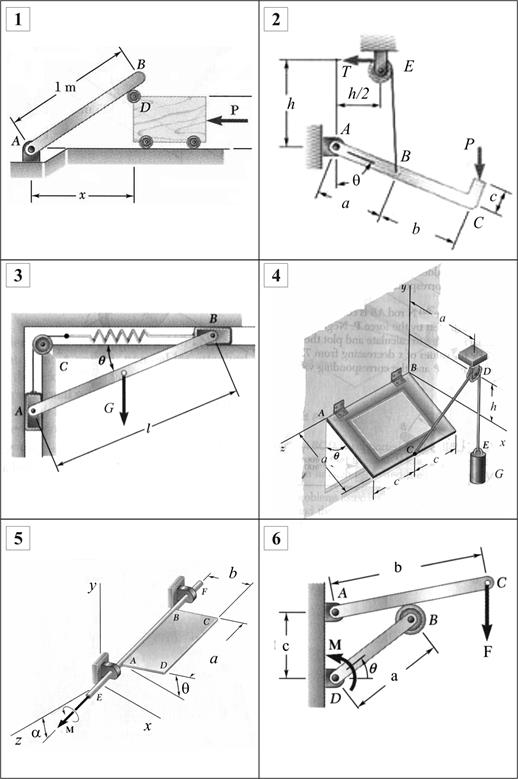
Рис. 6.1 Схемы конструкций
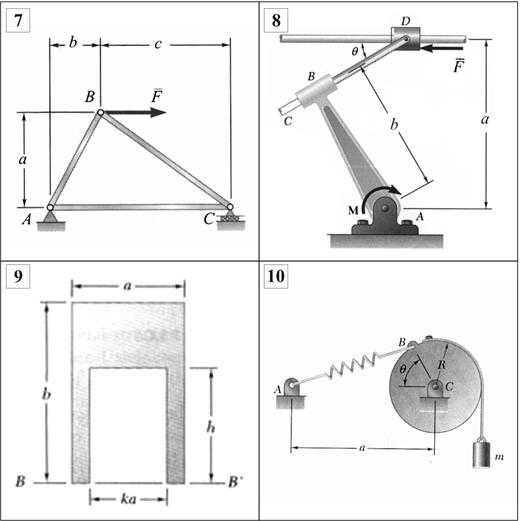
Рис. 6.1 (окончание)
соответствующую
равновесию системы, в функции угла q,
т.е. ![]() для
значений угла q от 0 до 90 °, т.е. 0£ q £
90°. b) Определить величину
q, соответствующую
равновесию системы, когда масса
груза m = 2 кг.
для
значений угла q от 0 до 90 °, т.е. 0£ q £
90°. b) Определить величину
q, соответствующую
равновесию системы, когда масса
груза m = 2 кг.
Т а б л и ц а 6.1
Исходные данные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.