
Если есть н.у. можно построить временную характеристику.
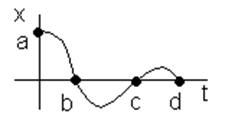 Глядя на такую характеристику можно сказать, что корни
будут комплексные с вещественной частью меньше 0. Если х будет уменьшаться, то
у относительной точки М0 будет или возрастать, или убывать(будет колебаться).
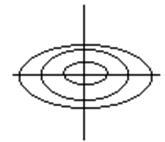
Так будет до тех пор пока х не станет =0. Все траектории будут иметь
спиралевидную форму и фокусироваться в начале координат. Эти графики получили название
типа фокус.
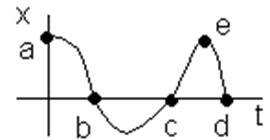
Глядя на такую характеристику можно сказать, что корни
будут комплексные с вещественной частью меньше 0. Если х будет уменьшаться, то
у относительной точки М0 будет или возрастать, или убывать(будет колебаться).
Так будет до тех пор пока х не станет =0. Все траектории будут иметь
спиралевидную форму и фокусироваться в начале координат. Эти графики получили название
типа фокус.
- фазовый портрет типа центр.
Возьмем другой переходной процесс который монотонно затухает :
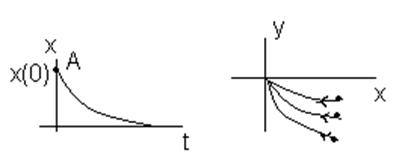 - фазовый портрет типа узла все характеристики
сходятся в одной т. Если стрелки к узлу значит устойчивая.
- фазовый портрет типа узла все характеристики
сходятся в одной т. Если стрелки к узлу значит устойчивая.
Пусть у системы 1 корень ![]() а второй
а второй
![]() т.е. система не устойчива, но один корень
будет стремиться попасть в узел а другой наоборот выйти из узла.
т.е. система не устойчива, но один корень
будет стремиться попасть в узел а другой наоборот выйти из узла.
- фазовый портрет типа седло.
 ТАУ 20.
Метод гармонической линеаризации и его использование при
ТАУ 20.
Метод гармонической линеаризации и его использование при
анализе и синтезе систем управления.
y=f(x)-
нелинейное звено, зависит от аргумента независим от времени. На вход НЭ сигнал
х может быть произвольной формы этот сигнал можно разложить на элементарные
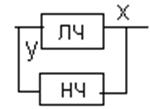
ф-ции x=asinwt-выходной сигнал нелинейного звена у можно разложить в
ряд Фурье  , далее сигнал у уприрается
в линейную часть. Линейная часть обрежет высокие составляющие, отфильтрует
гармоники выше 1-й, тогда
, далее сигнал у уприрается
в линейную часть. Линейная часть обрежет высокие составляющие, отфильтрует
гармоники выше 1-й, тогда  ,
, , если колебания будут симметричны, то
А0=0,
, если колебания будут симметричны, то
А0=0,
 ,
,  .
.
Для
1-й гармоники ![]() , в симметричных колебаниях А=
, в симметричных колебаниях А=![]()
![]()
![]()
![]() заменим
заменим  ,:,
,:,![]()
 Отсюда мы пришли в область линейных систем, выполнив
линеаризацию на основе гармонического баланса.
Отсюда мы пришли в область линейных систем, выполнив
линеаризацию на основе гармонического баланса.
Для нелинейных систем такого вида можно найти параметры н.э.
Вначале была зависимость y=F(x), затем находим W(p) за счет появления временного аргумента. Wн.э=q+jq’-необходимо найти коэффициенты q и q’
Произведем замену: ![]()
 ,
,  .
.
В зависимости от того, какого типа нелинейность и нелинейность относительно нач координат, то
 ,
, 
 ТАУ 21-1. Синтез дискретных компенсационных регуляторов из
условия обеспечения желаемого времени регулирования. Для
объектов без запазд-я
ТАУ 21-1. Синтез дискретных компенсационных регуляторов из
условия обеспечения желаемого времени регулирования. Для
объектов без запазд-я
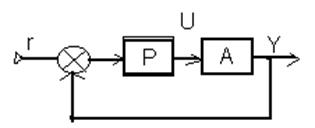
W= Пусть структура регулятора будет свободной. Пусть
необходимо чтобы на выходе системе получили желаемый результат за m
тактов: Y(mT)=r(0), r(0)=1(kT)
Пусть структура регулятора будет свободной. Пусть
необходимо чтобы на выходе системе получили желаемый результат за m
тактов: Y(mT)=r(0), r(0)=1(kT) ![]() r(Z)=
r(Z)=
Будем считать, что нам объект инертный на начальном такте на выходе отсутствует сигнал, тогда:
Y(Z)=![]()
Аналогично для выхода регулятора:
![]() Необходимо сократить
насколько слагаемых
Необходимо сократить
насколько слагаемых

Начиная с элемента 1Z![]() остальные элементы уничтожаются т.к. они подобны
получаем полином
остальные элементы уничтожаются т.к. они подобны
получаем полином
P(Z)=Y(1)Z![]() -1Z
-1Z![]()
Q(Z)
Принимаем полиномы:
Р(Z)=P1Z![]() Q(Z)=Q0+Q1Z
Q(Z)=Q0+Q1Z![]()
P1=Y(1) Q0=U(0)
P2=Y(2)-Y(1) Q1=U(1)-U(0)
. ….
Pm=Y(m)-Y(m-1)=1-Y(m-1) Qm=U(m)-U(m-1)
Мы можем найти передаточную ф-цию нашего объекта:
 c
другой стороны нам дана передаточная ф-ция объекта:
c
другой стороны нам дана передаточная ф-ция объекта:
Разделим все коэффициенты на Q0 и получим à
ТАУ 21-2
![]()
Вернемся к нашей передаточной ф-ции Wзс= Wзс
Wзс![]() P(Z)
P(Z)
P(Z)=  неизвестная
Wp
неизвестная
Wp
P(Z)+P(Z)W(p)
P(Z)=Wp*( )
)
1=Wp*( ) Wp=
) Wp= получили передаточную ф-цию регулятора
получили передаточную ф-цию регулятора
 Для объектов с запаздыванием
Для объектов с запаздыванием
W= Пусть структура регулятора будет свободной. Пусть
необходимо чтобы на выходе системе получили желаемый результат за m
тактов: Y(mT)=r(0),r(0)=1(kT) ![]() r(Z)=
r(Z)=
Будем считать, что нам объект инертный на начальном такте на выходе отсутствует сигнал, тогда:
Y(Z)=![]()
Аналогично для выхода регулятора:
![]() Необходимо сократить
насколько слагаемых
Необходимо сократить
насколько слагаемых

Начиная с элемента 1Z![]() остальные элементы уничтожаются т.к. они подобны
получаем полином
остальные элементы уничтожаются т.к. они подобны
получаем полином
ТАУ 21-3
P(Z)=Y(1)Z![]() --1Z
--1Z![]()
Q(Z)
Принимаем полиномы:
Р(Z)=P1Z![]() Q(Z)=Q0+Q1Z
Q(Z)=Q0+Q1Z![]()
P1=Y(1) Q0=U(0)
P2=Y(2)-Y(1) Q1=U(1)-U(0)
. ….
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.