ТАУ 13-2
 - больше неизвестных, чем число
уравнений.
- больше неизвестных, чем число
уравнений.
|
КПР |
||||||
|
ТИ |
||||||
|
КПР/ТИ |
Мы можем определить все частоты: будем задаваться значениями [wmin, wmax] с шагом Dw – и получить для различных w решение этих 2х уравнений. Далее составляем таблицу:
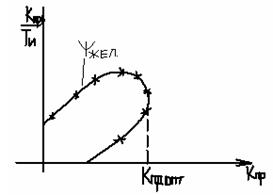 Строим график:
Строим график:
Чем > КПР, тем лучше.
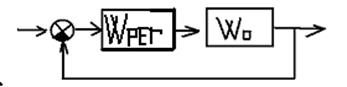
Если
взять ПИД-регулятор вида: 
![]()

Подобрали, что неплохие результаты получаются при ТD=0,1…0,15ТИ. Пусть ТD=0,15ТИÞподставим в WРЕГ и дальше та же методика (табл.,график), учитывая, что корни близко к Im.
 ТАУ 14-1.
Синтез систем управления методом расчета параметров регулятора на желаемый
показатель колебательности.
ТАУ 14-1.
Синтез систем управления методом расчета параметров регулятора на желаемый
показатель колебательности.
ПИ-регулятор: Задаемся WРЕГ. j=arcSin(1/MЖЕЛ). Имеем систему вида:
Передаточная ПИ-регулятора имеет вид: .
.
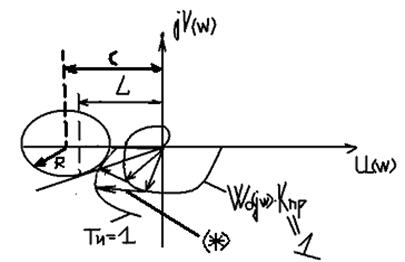 Строим АФЧХ, при КПР=1 для построения
интегральной составляющей:
Строим АФЧХ, при КПР=1 для построения
интегральной составляющей:
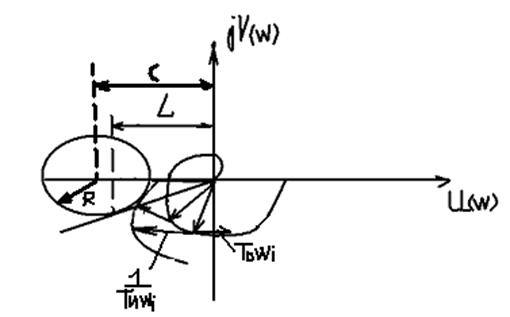
Здесь окружность строится:
Где L=1/KПР.РАСЧ.. Зададимся численными значениями ТИ=1;5;10;100;…
Строим один график для КПР=1, ТИ=5 и т.д.Þполучим семейство кривых, причем
1/ТИjw=-j(1/ ТИw).
Знак минус означает поворот по часовой стрелке(*). Задаемся частотами w [w1, w2, …wn], находим 1/ ТИwi. Получим новую кривую, проводим окружностьÞполучаем LÞ KПР.РАСЧ=1/ L. Составляем таблицу:
|
ТИ |
1 |
5 |
10 |
100 |
|
|
KПР.РАСЧ |
Строим график
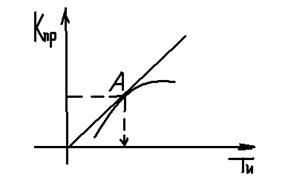
Точка А является лучшим вариантом.
Передаточная ПИД-регулятора вида:  .
.
Зададим:
|
ТИ |
1 |
5 |
10 |
100 |
|
|
ТD |
0,5 |
5 |
6 |
20 |
|
Строим АФЧХ, при КПР=1, интегральная составляющая –j(1/ТИwi), дифференциальная составляющая jТDwi. Тогда в силу –j(1/ТИwi)+ jТDwi при построении вектор –j(1/ТИwi) поворачиваем по часовой на 900 и jТDwi на 900 против часовой стрелки, получим суммарный вектор j(-1/ТИwi+ТDwi):
ТАУ 14-2
,
где окружность строится: .
Составляем таблицу:
|
ТИ |
1 |
5 |
10 |
100 |
|
|
ТD |
0,5 |
5 |
6 |
20 |
|
|
КПР.РАСЧ. |
Т.о. мы можем выполнить расчет параметров настройки регулятра.
ТАУ 15-1. Синтез системы управления с использованием упредителей Смита.
Пусть объект содержит большое запаздывание. На систему
действует возмущающее воздействие F. Передаточная объекта:![]()
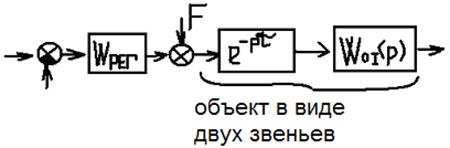
 Сложность – в запаздывании, решение этой задачи
предложил Смит:
Сложность – в запаздывании, решение этой задачи
предложил Смит:
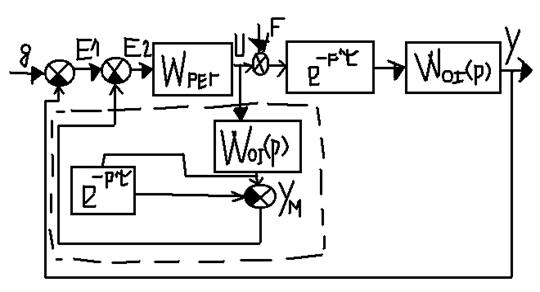
Упредитель Смита – пунктиром.
Имея эту структурную схему, можем попробовать записать связь выхода системы с задающим воздействием и возмущающим.
 ,
, 
F=0,
 ,
,  ,
, 



![]()

В области тех частот, которые характерны для работы
системы, выполняется условие: пусть ![]() Þ пренебрегаем
единицей:
Þ пренебрегаем
единицей:

ТАУ 15-2
![]() , получаем вид W –
чистое запаздывание, от него мы не можем избавиться у реального объекта.
, получаем вид W –
чистое запаздывание, от него мы не можем избавиться у реального объекта.
Возьмем задающее воздействие нулевое: F¹0, g=0:
![]()

(WРЕГWOI>>1)

![]()
ТАУ 16-1. Синтез инвариантных систем управления
Инвариантные системы – это достаточно важный класс систем. В пространстве часто меняется нагрузка, что изменяет технологические параметры аппарата и вызывает необходимость коррекции потоков. Теория инвариантных систем практически создана 40 лет назад. Система описывается уравнениями:
 Если решение нечувствительно к воздействию
составляющей правой части, то система может называться полностью инвариантной.
Если решение нечувствительно к воздействию
составляющей правой части, то система может называться полностью инвариантной.
Если влияние воздействия малое (<e), то считается, что система инвариантна к f1 до этого значения e.
 заменим столбец x1 на
заменим столбец x1 на  .
.
Т.е.
 Можно сказать, что решение x1:
Можно сказать, что решение x1:  .
.
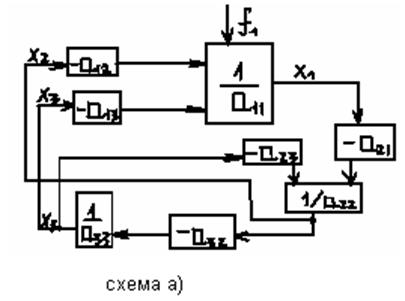 Если f1¹0, то для того, чтобы это решение x1 не зависело от f1ÞD1=0. Если есть
модель системы управления, которую можно свести к такой форме (алгебраической),
то можно найти каким соотношениям должны удовлетворять коэффициенты, чтобы один
из сигналов x был не зависим от возмущений.
Если f1¹0, то для того, чтобы это решение x1 не зависело от f1ÞD1=0. Если есть
модель системы управления, которую можно свести к такой форме (алгебраической),
то можно найти каким соотношениям должны удовлетворять коэффициенты, чтобы один
из сигналов x был не зависим от возмущений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.