Дальше, когда переменные состояния ![]() будут формир-ся и будут близкие
к х, тогда можно сформировать закон управления, построить регулятор.
будут формир-ся и будут близкие
к х, тогда можно сформировать закон управления, построить регулятор.
Этот
наблюдатель нужен для использования ![]() для достижения
желаемых значений.
для достижения
желаемых значений.
Нахождение законов для реализации наблюдателя:
Когда А и В известны, тогда
набл-ль можно реализовать в следующей форме: ![]()
Отсюда
будем находить ![]() . Для этого нужно решить
систему ДУ, но нужно иметь начальные условия. Если бы эти условия были равны
условиям объекта
. Для этого нужно решить
систему ДУ, но нужно иметь начальные условия. Если бы эти условия были равны
условиям объекта ![]() (0) = х(0) , то решение
получили бы такое же как и для объекта.
(0) = х(0) , то решение
получили бы такое же как и для объекта.
Т.к.
переменные состояния неизвестны, то ![]() (0) –
неизвестны. Нужно подбирать их самостоятельно или найти какое-нибудь правило.
Дальше нужно ввести параметры для оценки
(0) –
неизвестны. Нужно подбирать их самостоятельно или найти какое-нибудь правило.
Дальше нужно ввести параметры для оценки ![]() ,
которые получим на основе наблюдателя.
,
которые получим на основе наблюдателя.
Воспользуемся
еще одной формой записи : y = Cx, тогда ![]() .
.
![]() когда эта разница
→0, то
когда эта разница
→0, то ![]() будут близкие к х.
будут близкие к х.
Введем ![]() и заменим
и заменим ![]() другим вариантом:
другим вариантом:
![]()
В правой части появляется дополнит. составляющая, которая вносит коррекцию.
ТАУ 29-2 Такой
наблюдатель предложил Люснбергер. ![]() - вносит дополнит.
стабилизацию в систему, за счет которой
- вносит дополнит.
стабилизацию в систему, за счет которой ![]() будет
ближе к х.
будет
ближе к х.
![]()
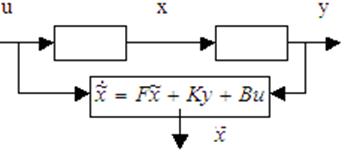
В состав матрицы F входит переменная К:
F = А – КС , где К – матрица, элементы которой являются коэф-ми усиления.
Это ур-ние можно рассмотреть с точки зрения
устойчивости. Можно рассмотреть однородное ур-ние: ![]()
![]()
![]() - характеристическое ур-ние.
- характеристическое ур-ние.
Его можно записать в виде:  ,где αi
– корни характ-го ур-ния.
,где αi
– корни характ-го ур-ния.
Дальше можно задаться этими корнями, один или два ближе к оси Im (α1). Ближний корень будет дольше тянуть хвост переходного процесса. Выбрав tрег, можно найти α1 (tрег ~3…4 α1). Остальные корни можно взять на порядок больше, чтобы быстрее закончился переходной процесс.
Дальше можно раскрыть скобки, получить характеристическое ур-ние, найти составляющие γ1, γ2 … методом сравнения коэф-тов при pn-1, pn-2,….. Затем можно вернуться к элементам матрицы F и элементам матрицы К.
Рассмотрим другой вариант.
Можно найти W(объекта) и W(наблюдателя) и попробовать их приравнять:
 при нулевых условиях Х(0).
при нулевых условиях Х(0).
Т.о. мы от переменных состояния будем стремиться избавиться.
![]()
![]()
На основе модели наблюдателя при нулевых начальных условиях:
![]() вместо Y подставим Y = CХ:
вместо Y подставим Y = CХ:
![]()
![]()
![]() , тогда
, тогда ![]()
Дальше
приравняем ![]() Wоб и
Wоб и ![]() :
:
![]()
![]()
![]()
ТАУ 30-1. Адаптивные системы управления. Классификация. Синтез адаптивной системы с эталонной моделью на основе подстройки коэффициентов уравнения в переменных состояния.
Адаптивные – системы, способные приспосабливаться к объектам. Способны изменять свою структуру, коэф-ты настройки регуляторов с целью обеспечения хороших показателей качества. Система приспосабливается к пар-рам внешней среды, которые изменяются с течением времени. Бывают:
1) C идентификацией параметров модели объекта управления
2) C эталонной моделью на основе подстройки коэффициентов уравнения в переменных состояния

Модель эталонной системы
Параметры А,Н,В,С- неизвестны, известен только порядок матриц.
Нужно подобрать регулятор т.о. чтобы с течением
времени адаптации он изменил свои параметры так , чтобы вместе с обьектом
управления он создал такой же выход как и эталонная модель. Нужно взять ![]() - ошибка
- ошибка  .
.
Возьмем упрощенный вариант системы: x=Ax+Hg+U, U-выход регулятора
![]() (напоминает П-рег-р) Адаптация будет
идти на основе параметров регулятора
(напоминает П-рег-р) Адаптация будет
идти на основе параметров регулятора ![]()
![]() найдем ур-ие для ошибки
найдем ур-ие для ошибки
![]()
 поскольку x,g,
поскольку x,g,![]() доступны измерению, то они известны
доступны измерению, то они известны ![]() будем привязываться к функции Ляпунова
чтобы оценить устойчивость
будем привязываться к функции Ляпунова
чтобы оценить устойчивость ![]()
Матрицы R,![]() должны быть позитивно определены чтобы была уст-ть
должны быть позитивно определены чтобы была уст-ть ![]()
![]() , Q-
положительна продифференцируем исходную
ф-цию по переменным
, Q-
положительна продифференцируем исходную
ф-цию по переменным

ТАУ 30-2
Можем сократить на ![]()
 (1)
(1)
Если
проинтегрируем уравнения (1) ,то мы получим значения элементов Ф и ![]() в любой момент времени
в любой момент времени  когда время адаптации подстройки рег-ра
<< чем период на протяжении которого могут изменится элементы матриц А и
Н
когда время адаптации подстройки рег-ра
<< чем период на протяжении которого могут изменится элементы матриц А и
Н
В соответствии с этими 3-мя уравнениями мы находим предыдущее.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.