1. Для линейного непрерывного стационарного объекта на основе классического интегрального критерия.
Рассмотрим простейший вариант. Пусть объект описывается линейной, стационарной, детерминированной моделью, без запаздывания.
Пусть
существует функция ![]() , которая соответствует
экстремальным значениям в каждый момент времени. Когда существует такая функция
и есть ее значения, тогда эти значения можно аппроксимировать некоторой
математической функцией. D, C – матрицы весовых коэффициентов, которые определяют
роль отдельных переменных в составе подынтегральной функции. Зададимся
, которая соответствует
экстремальным значениям в каждый момент времени. Когда существует такая функция
и есть ее значения, тогда эти значения можно аппроксимировать некоторой
математической функцией. D, C – матрицы весовых коэффициентов, которые определяют
роль отдельных переменных в составе подынтегральной функции. Зададимся ![]() . Тогда имеем:
. Тогда имеем: 
Берем
частную производную по u и приравниваем ее к 0. Получаем оптимальное
управление: ![]() . Для нахождения матрицы R
подставляем uопт в
исходный критерий. Тогда имеем:
. Для нахождения матрицы R
подставляем uопт в
исходный критерий. Тогда имеем: ![]()
2. Для линейного непрерывного стационарного объекта на основе критерия обобщенной работы.
Критерий обобщенной работы: J=∫ [XTDX+XTRBCBTRX+UTC-1U]dt
Рассмотрим синтез системы с таким критерием:
![]() =Ax+Bu
=Ax+Bu
J=∫ [XTDX+XTRBCBTRX+UTC-1U]dt
Будем искать оптимальный закон управления и неизвестную матрицу R.
Найдем Min=φ=XTRX.
Дальше
используем ур-ние Белмана : 
A,B,C,D –не зависят от времени ; R – также, тогда имеем :
0 = min { XTDX+XTRBCBTRX+UTC-1U+(RX)T(AX+BU)+(AX+BU)TRX }
0 = min { XTDX+XTRBCBTRX+UTC-1U+XTRAX+XTRBU+XTATRX+UTBTRX }
Дальше
берем производную :  C-1U+C-1U+BTRX+BTRX
C-1U+C-1U+BTRX+BTRX
Находим Uопт = -СBTRX
Подставим закон управления в функц-ое ур-ние :
0 = XTDX+XTRBCBTRX+XTRBCBTRX+XTRAX–XTRBCBTRX+XTATRX–XTRBCBTRX 0 = XTDX+XTRAX+XTATRX
Можно сказать, что все составляющие имеют общие множители XT и X, поэтому 0 можно домножить на XT и X и сократить : 0 = D+RA+ATR.
Отсюда находим матрицу R.
ТАУ 27-2
Если
бы объединить последние 2 составляющие , тогда 0 = D+![]()
И
тогда ![]()
Такой подход был предложен Красовским А.А.
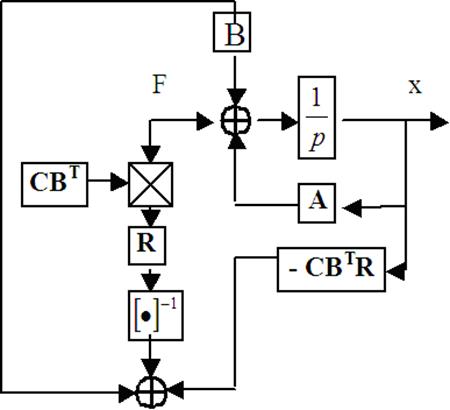
3. Для линейного непрерывного стационарного объекта подверженного измеряемым возмущениям.
Рассмотрим
синтез такой системы : ![]() = Ax+Bu
= Ax+Bu
J=∫ [XTDX + UTC-1U]dt
X = Xфакт – Xжел , F – воздействие .
Используем ур-ние Белмана для
непрерывной системы: 
[·] – подинтегральная ф-ция .
Зададимся ф-цией φ = XTRX + LX + XTL , где R=RT , L=LT
Т.к. матрицы не зависят от времени, тогда :
0 = min { XTDX+UTC-1U+(RX+L)T(AX+BU)+(AX+BU)T( RX+L) }
0=min{XTDX+UTC1U+XTRAX+XTRBU+XTRF+LAX+LBU+LF+XTATRX+ +XTATL+ UTBTRX + UTBTL+FTRX+ FTL }
Дальше берем производную от {·} и = 0 : 0=C1U+C1U+BTRX+BTL+BTRX+BTL
Uопт = - CBTRX – CBTL ; UTопт = - XTRBC – LBC
Подставим в функц-ое ур-ние закон управления :
При том, что UTC-1U = -[ XTRBC + LBC ]C-1[ CBTRX + CBTL ]
UTC-1U = XTRBCBTRX+XTRBCBTL+LBCBTRX+LBCBTL
0 = XTDX+ XTRBCBTRX+XTRBCBTL+ LBCBTRX+LBCBTL+ XTRAX– XTRBCBTRX– XTRBCBTL+XTRF+LAX– LBCBTRX–LBCBTL+LF+ XTATRX+ +XTATL – XTRBCBTRX– LBCBTRX– XTRBCBTL– LBCBTL+FTRX+FTL
Собираем составляющие с одинаковыми множителями :
XT·0·X = XTDX+ XTRAX+ XTATRX– XTRBCBTRX
XT·0 = XTRF+XTATL– XTRBCBTL
0·X = LAX+ FTRX–LBCBTRX
 0
= LF+ FTL– LBCBTL
0
= LF+ FTL– LBCBTL
Сокращаем иксы :
1) 0 = D+ RA+ ATR–RBCBTR → R
2) 0 = RF+ATL– RBCBTL
3) 0 = LA+ FTR–LBCBTR
4) 0 = LF+ FTL– LBCBTL → L
Отсюда L = FTR· [BCBTR–A]-1
Подставим в закон управления :
Uопт = - CBTRX – CBTFTR· [BCBTR–A]-1
ТАУ 27-3
4. Для линейного непрерывного стационарного объекта с запаздыванием по каналу управления.
![]() (t) = A·x(t) + B·u(t-τ)
(t) = A·x(t) + B·u(t-τ)
Построим структуру объекта. Задача: попробовать математическими переходами спрятать элемент с запаздыванием за другими переменными.
 |
Пусть каждый из введенных блоков имеет элементарное звено 1-го порядка.
Видим, что чем больше апериодич. звеньев, то больше получается запаздывание. Т.о. можно получить u(t) на входе в систему той же амплитуды, изменяются Ti и Ki.
Wзап.(p) = e-pτ
Можно разбить запаздывание на экспоненты: e-p·0.2τ · e-p·0.2τ · ….
Экспоненту можно разложить в ряд:
e-p·0.2τ =  =
=
Ограничимся двумя составляющими. 
Дальше можно перейти на ДУ 1-го порядка:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.