![]() – коэффициент
схемы по ЭДС;
– коэффициент
схемы по ЭДС;
![]() –
коэффициент, учитывающий снижение напряжения в сети;
–
коэффициент, учитывающий снижение напряжения в сети;
![]() –
коэффициент падения напряжения на активных сопротивлениях трансформатора,
анодного реактора, а также падение напряжения из-за коммутации вентилей;
–
коэффициент падения напряжения на активных сопротивлениях трансформатора,
анодного реактора, а также падение напряжения из-за коммутации вентилей;
![]() –
коэффициент, учитывающий неполное открывание вентилей (для нереверсивной
схемы).
–
коэффициент, учитывающий неполное открывание вентилей (для нереверсивной
схемы).
Полная мощность трансформатора, В·А:
 , (9.15)
, (9.15)
где Рн.дв. – номинальная мощность двигателя, кВт;
ηдв – КПД двигателя;
kсх.Р – коэффициент схемы по мощности (находится в справочниках).
9.1.3. Расчет элементов защиты ветилей от аварийных токов
Для защиты вентилей от токов короткого замыкания (ток к.з. ограничивается на уровне, не превышающем ударный ток тиристора) используют анодные реакторы включенные в фазы на входе выпрямителя.
Требуемуемая индуктивность анодного реактора фазы рассчитывается по формуле
 , (9.16)
, (9.16)
где к – количество анодных реакторов;
Iуд – ударный неповторяющийся ток в открытом состоянии, А.
Параметры анодных реакторов приведены в табл. 8.1. приложения
9.1.4. Расчет реакторов, ограничивающих уравнительные токи
При согласованном управлении вентильными комплектами индуктивность токоограничивающих реакторов определяется по формуле, Гн,
 , (9.17)
, (9.17)
 где U2m=U2фm – амплитуда
фазного напряжения для трехфазной встречно-параллельной схемы, для трехфазной
нулевой перекрестной схемы; U2m=U2πm – амплитуда линейного напряжения для трехфазной мостовой
перекрестной схемы;
где U2m=U2фm – амплитуда
фазного напряжения для трехфазной встречно-параллельной схемы, для трехфазной
нулевой перекрестной схемы; U2m=U2πm – амплитуда линейного напряжения для трехфазной мостовой
перекрестной схемы;
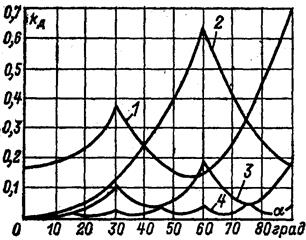
kД – коэффициент действующего значения уравнительного тока, определяемый по кривым рис.9.1. в зависимости от угла α;
Iур – действующее значение уравнительного тока (обычно оно не превышает 10% номинального тока).
9.2. Датчики скорости
В регулируемых электроприводах используются различные способы получения информации о скорости ротора электрической машины:
1. путем непосредственного измерения угловой скорости ротора с помощью тахогенераторов постоянного или переменного тока, а также фотоимпульсных датчиков;
2. путем вычисления ЭДС якоря Ея в электроприводах постоянного тока при диапазоне регулирования D≤50.
Тахогенераторы серий ПТ и ТТ обладают значительными габаритами и массой и используются в основном как датчики скорости в приводах прокатных станов, бумажной, химической промышленности и как датчики скорости мощных турбоагрегатов.
Для приводов средней мощности, не предъявляющих высокоих требований к точности регулирования, используются тахогенераторы постоянного тока серийЭТ, ТМГ и ТД.
В нереверсивных приводах малой мощности, где важно малое значение инерции ротора тахогенератора, применяются асинхронные тахогенераторы переменного тока серий ТГ иАТ.
Тахогенераторы переменного тока, используемые в системах управления, работающих на сигналах постоянного тока, требуютдополнительной аппаратуры – выпрямителей, фильтров и специальных фазочувствительных приставок для различеия направления вращения и преобразования сигнала переменного тока в сигнал постоянного тока.
Технические данные тахогенераторов приведены в приложении.
Структурная схема датчика скорости представлена на (рис. 9.2). Схема датчика представлена на рис.9.1.
|
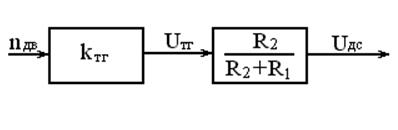

Порядок расчета датчика следующий.
Рассчитывают напряжение на выходе тахогенератора при работе двигателя постоянного тока с частой, равной частоте вращения при идеальном холостом ходе, В:
![]() . (9.18)
. (9.18)
Рассчитывают делитель напряжения: входное напряжение делителя Uвх=Uтг, В, а выходное напряжение – Uвых=Uз.скор. мах:
.
 ; (9.19)
; (9.19)
где Uз.скор. мах – максимальное напряжение задания скорости в САУ.
|
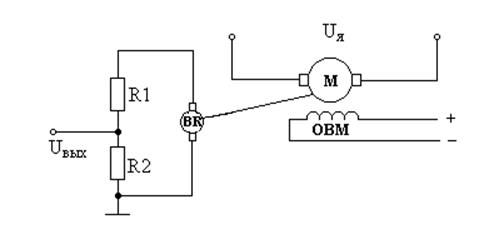

Выбирают из справочника резисторы, а затем уточняют значение выходного напряжения датчика скорости по формуле
 . (9.20)
. (9.20)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.