МТ=(1,5÷2,0) Мном, где Мном – номинальный момент двигателя.
Максимальное отклонение момента инерции, кг·м²
 . (7.6)
. (7.6)
Максимальное отклонение тормозного момента, Н·м
 . (7.7)
. (7.7)
Для
рассчета пониженной скорости ωср по (7.1) задаются величинами: ![]() ,
,
![]() ,
, ![]() с.
с.
Меньшие
значения ![]() принимают для электроприводов, работающих
с обратными связями по скорости и имеющих жесткие механические характеристики.
Большие значения этого отношения могут быть взяты для электроприводов без
обратных связей по скорости.
принимают для электроприводов, работающих
с обратными связями по скорости и имеющих жесткие механические характеристики.
Большие значения этого отношения могут быть взяты для электроприводов без
обратных связей по скорости.
Рассчитаем пониженную скорость, которая обеспечит точность останова ΔSдоп. Для этого решим уравнение (7.1) относительно ωср.
Положим
 ; (7.8)
; (7.8)
 , (7.9)
, (7.9)
тогда уравнение (7.1) примет вид:
![]() . (7.10)
. (7.10)
Решение (7.10) запишем в виде
 . (7.11)
. (7.11)
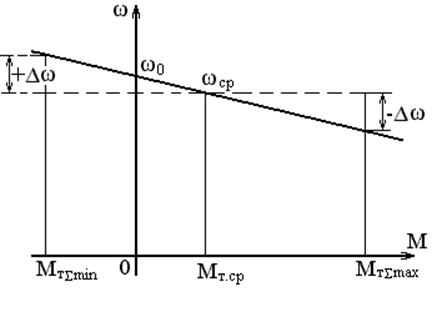
Рассчитав ωср, находят отклонения угловой (или линейной) скорости
![]() . (7.12)
. (7.12)
Затем строят характеристику ωср=f(М) (рис. 7.2), на которой отмечают скорость идеального холостого хода ω0.
Расчетное значение ωср необходимо реализовать в системе электропривода, которая должна обеспечивать требуемый диапазон рнегулирования скорости:
 .
(7.13)
.
(7.13)
Скорость идеального холостого хода для пониженной скорости ω0 определяет минимальную величину выходного напряжения в системе управляемый выпрямитель – двигатель постоянного тока
![]() (7.14)
(7.14)
или минимальную выходную частоту преобразователя в системе преобразователь частоты – асинхронный двигатель
 . (7.15)
. (7.15)

 После построения механической характеристики двигателя
для пониженной скорости в данной системе электропривода необходимо проверить
возможность работы двигателя на этой характеристике при Мс.max. Если окажется, что при Мс.max пониженная скорость равна нулю или отрицательна, то
необходимо использовать замкнутую по скорости систему.
После построения механической характеристики двигателя
для пониженной скорости в данной системе электропривода необходимо проверить
возможность работы двигателя на этой характеристике при Мс.max. Если окажется, что при Мс.max пониженная скорость равна нулю или отрицательна, то
необходимо использовать замкнутую по скорости систему.
Из анализа выражения (7.1) следует, что повысить точность остановки можно в первую очередь снижением скорости ωср, а также уменьшением времени tср и умеличением тормозного момента МТср. Поэтому следует применять быстродействующие аппараты и сокращать число последовательно срабатывающих аппаратов. Повышение момента механического тормоза может, однако привести к увеличению темпа торможения органа выше допустимого (αт>αдоп).
8. ОКОНЧАТЕЛЬНАЯ ПРОВЕРКА ВЫБРАННОГО ДВИГАТЕЛЯ
В результате расчета переходных процессов за цикл работы мы получаем возможность построить зависимости ω(t), М(t), I(t). Эти зависимости позволяют произвести окончательную проверку двигателя по нагреву, перегрузочной способности и допустимым ускорениям.
Проверка по нагреву проводится методом средних потерь или эквивалентных величин.
При вычислении эквивалентного момента сложной кривой используют методы приближенного интегрирования, заменяя площадь сложной кривой суммой площадей элементарных фигур: трапеций, треугольников и прямоугольников.
Затем находят эквивалентные значения момента для трапеции:
 , (8.1)
, (8.1)
треугольника
 ,
(8.2)
,
(8.2)
прямоугольника
![]() .
(8.3)
.
(8.3)
В итоге площадь под сложной кривой заменяется суммой площадей эквивалентных прямоугольников. Эквивалентный момент рассчитывают по (4.4).
Условиями правильного выбора двигателя по нагреву будут:
![]() ;
;
![]() ;
;
![]() .
.
Для самовентилируемых двигателей при определении эквивалентных величин необходимо вводить поправки на ухудшение условий охлаждения при пуске, торможении и остановке согласно п.4.
По перегрузке дигатель будет выбран правильно, если
![]() ,
,
![]() .
.
Для оценки ускорений необходимо продифференцировать кривую скорости и найти
 , (8.4)
, (8.4)
которое требуется сравнить с εдоп. При этом необходимо, чтобы выполнялось условие
![]() . (8.5)
. (8.5)
9. ЭЛЕМЕНТЫ ЭЛЕКТРОПРИВОДА
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.